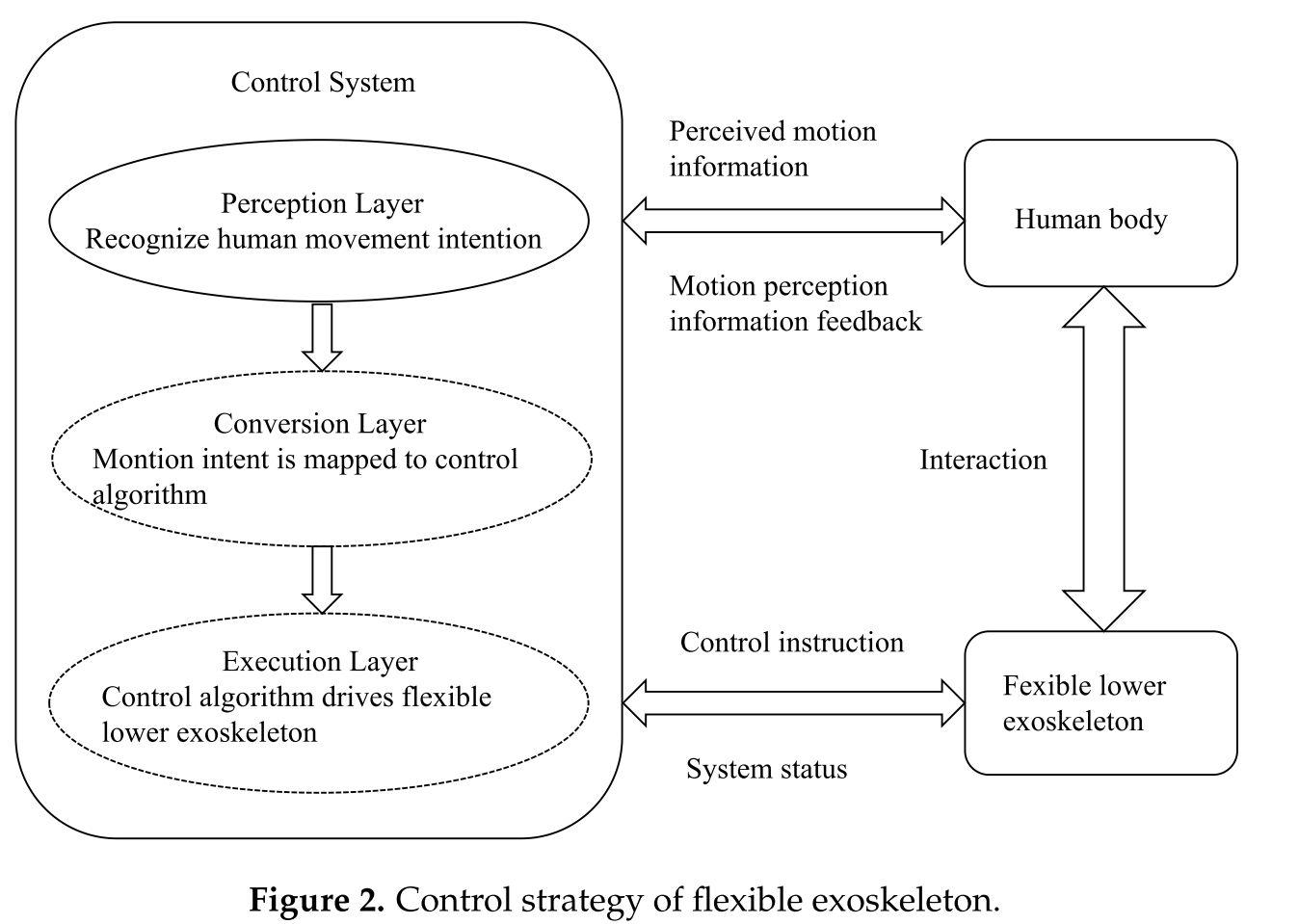
A novel motion intention recognition approach for soft exoskeleton via IMU
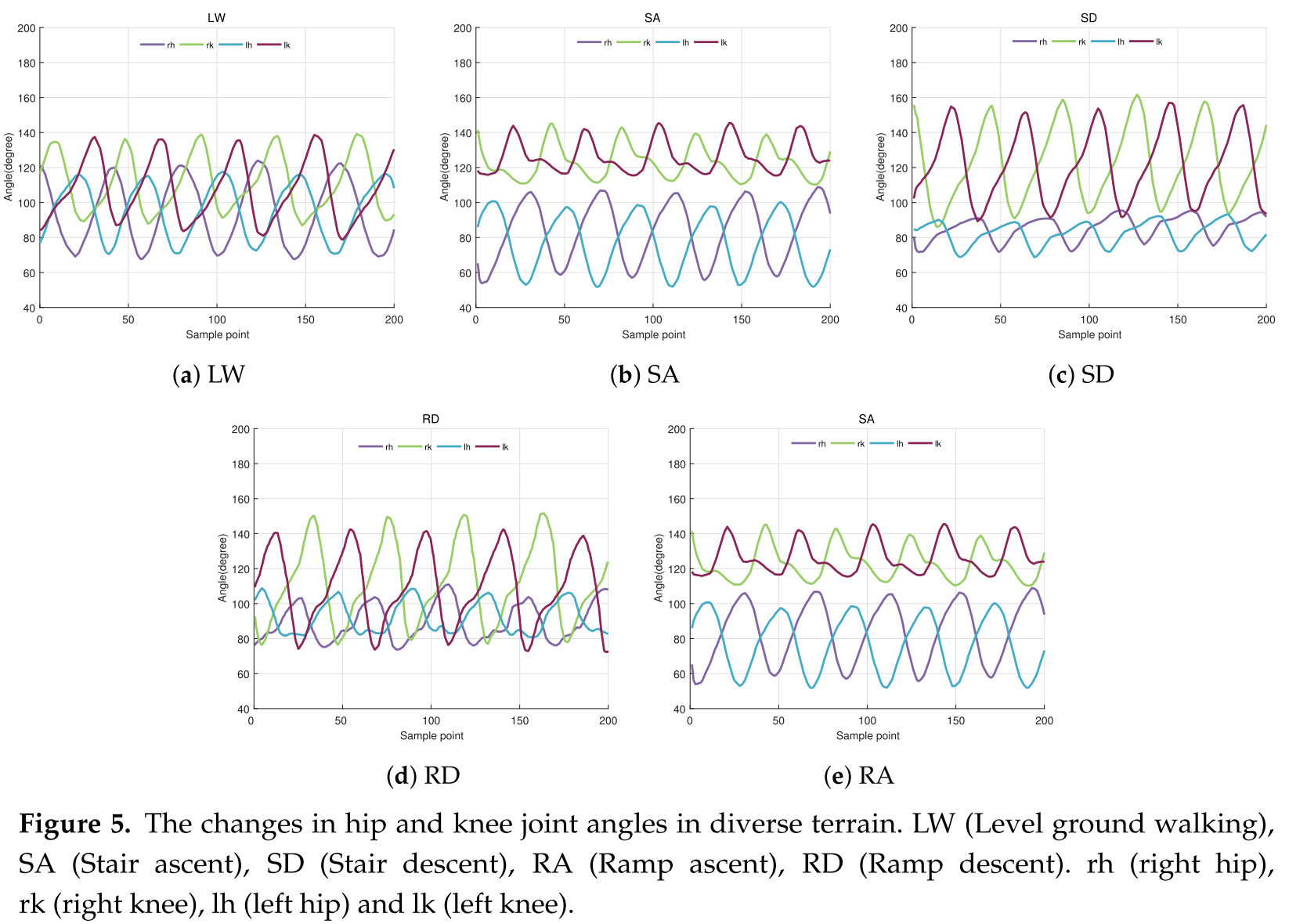
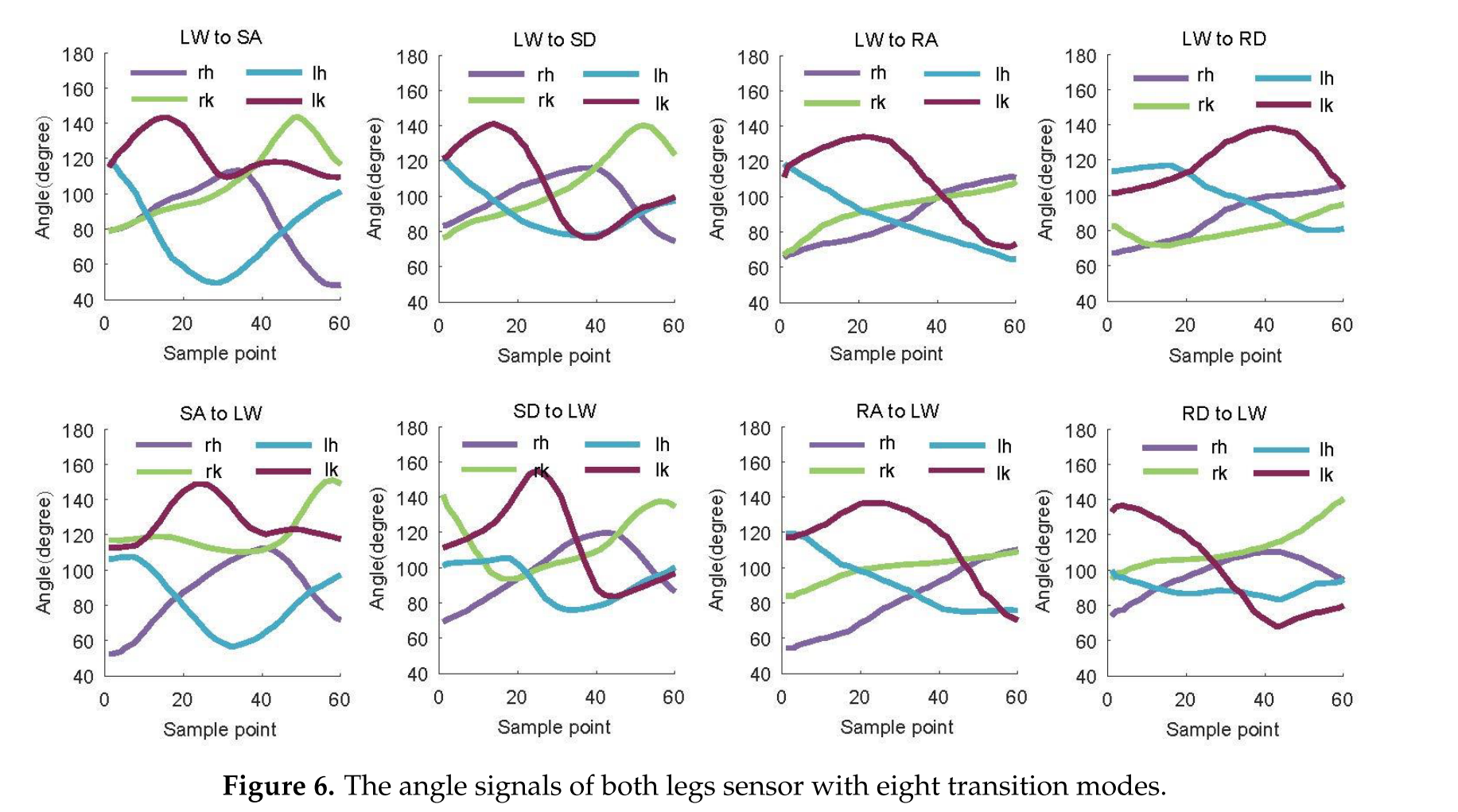
intention定义: the classic five kinds of terrains(including walking on flat ground, going up and downstairs, and up and down slopes) & transformed terrains
| Abbreviation | Definition | Abbreviation | Definition |
|---|---|---|---|
| IMU | Inertial measurement unit | SA | Stair ascent |
| DDLMI | DNN-based deep locomotion mode identification | SD | Stair decent |
| ISR | Identification success rate | RA | Ramp ascent |
| LW | Level-ground walking | RD | Ramp decent |
Research question
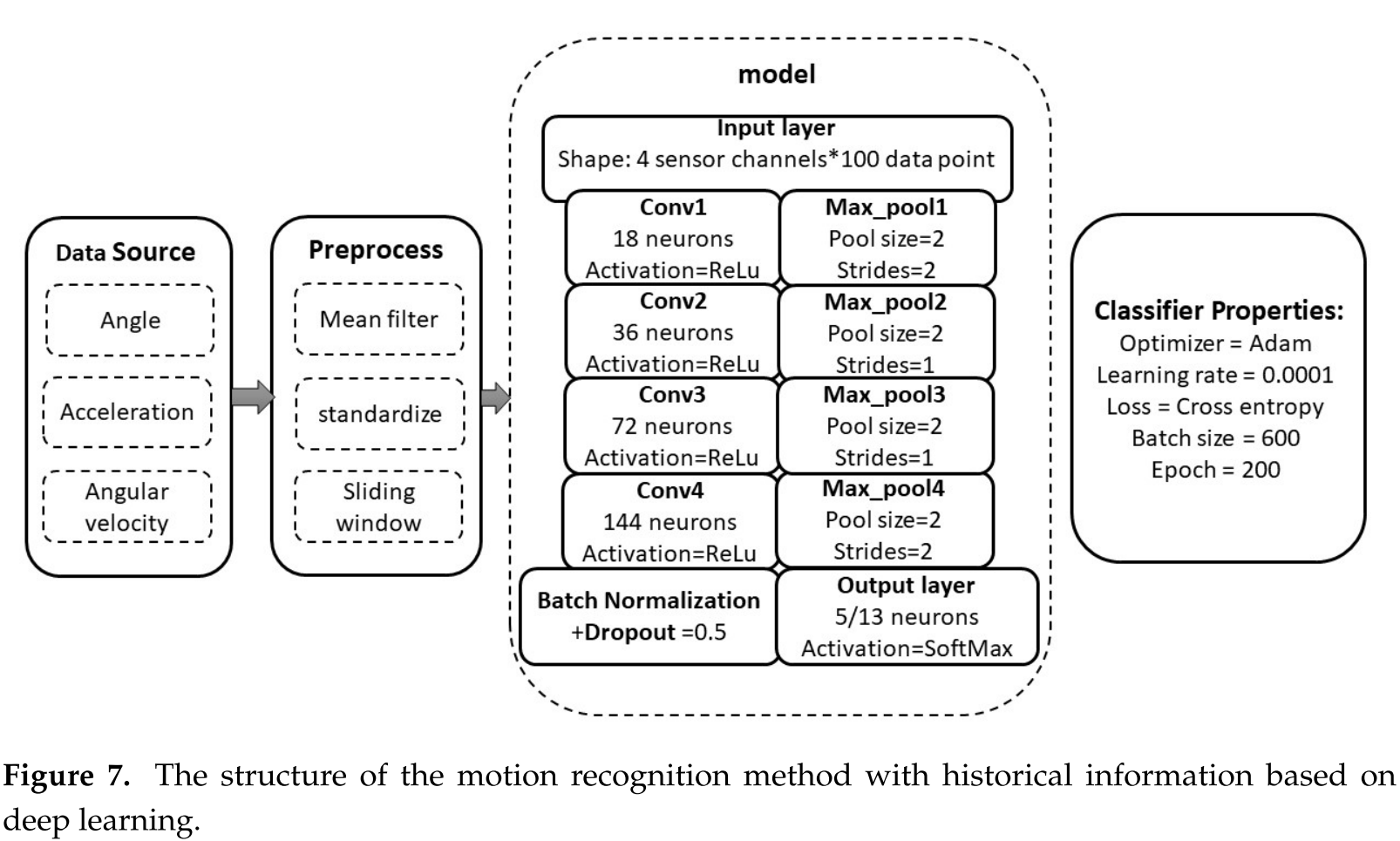
to propose a recognition method with historical information based on neural network to recognize different terrain and add the pattern transformation recognition, trying to predict the next motion mode in advance.
Introduction
-
前人的一些工作
The recognition of locomotion patterns in different terrains is a base for soft exoskeleton to achieve precise control. Several motion recognition methods have been proposed for different types of signals [6]. Electromyography (EMG) is one of the most important signals in motor pattern recognition [6,7]. Based on the EMG signal controller, Michael et al. [8] proposed a recognition method for walking on flat ground, ramps up and downhill. Joshi et al. [6] present a classification method to recognize walking on ground, ascending stairs and the transition between these motions using the spectrogram of EMG signal. Another accessible signal is ground reaction force (GRF), usually collected by a plantar pressure sensor on insole [9–11]. Duc Nguyen et al. [12] extracted plantar pressure data as input features, and proposed five classical motion pattern recognition methods by using the K-nearest neighbor (KNN) classification method. Chen et al. [13] identified different motion patterns through wearable capacitance sensors without requiring real-time gait conversion. Li et al. [14] used the threshold method based on inertial measurement unit (IMU) to identify horizontal ground, staircase rise/fall and slope rise/fall, which required only a few sensors and low computation. However, there is a phase delay in the transition to identification. Multi-sensor fusion, which is able to enhance system performance and robustness, has been widely used in recent years [15–17]. In [18], a neural muscle mechanical fusion motion pattern recognition algorithm combining EMG and GRF is proposed, which involves installing seven or more electrodes in the extremities and an insole with a pressure sensor at the foot of a healthy limb. Ma et al. [19] proposed a kernel recursive least-squares method (KRLS) to show the model generalization abilities. ……
-
其他sensor的缺点
- EMG is often used to recognize biological signals of motion patterns. However, the electrode of the EMG signal must stick to the surface of the human skin. Once the human body perspires, the wire will fall off, which brings a lot of trouble to practical application [22].
- GRF is ineffective on uneven ground where the swing phase and the pressure sensor are not in full contact, even though it is readily available.
The Structure of Exoskeleton and Analysis of Motion Characteristics
Methods
Gait Data Process
-
mean filter with a window length of three $$ \begin{cases}\begin{array}{l} \theta_{i}(t-j)^{\prime}=\frac{1}{3} \Sigma_{1}^{-1} \theta_{i}(t-j),\\ a_{i}(t-j)^{\prime}=\frac{1}{3} \sum_{1}^{-1} a_{i}(t-j), i=\{r h,l h, r k, l k\}\\w_{i}(t-j)^{\prime}=\frac{1}{3} \Sigma_{1}^{-1} w_{i}(t-j)\end{array}\end{cases} $$ where $ \theta $ is the joint angle at time t before filtering and $ \theta^{\prime} $ is the corresponding joint angle after filtering. In the same way, $ a, a^{\prime}, w, w^{\prime} $. Here, $ i $ denotes one of the six joints, and $ j $ is the tag of a window.
Therefore, the characteristics of the DDLMI model are characterized according to Equation (2):
$x=[\theta_{i}, a_{i}, w_{i}]^{T}, i=\{r h, l h, r k, l k\}\Rightarrow$ input: joint angle, angular acceleration and angular velocity(an axis angle (x), two axes (XY) acceleration and two axes (YZ) angular velocity)
-
max-min normalization
standardize the input vector elements to the range of [−1, 1]
-
a sliding window
Each window sequence is a training sample. In this paper, the window size is set to 100, and the step size is 50. 单位是啥❓
Locomotion Mode Identification
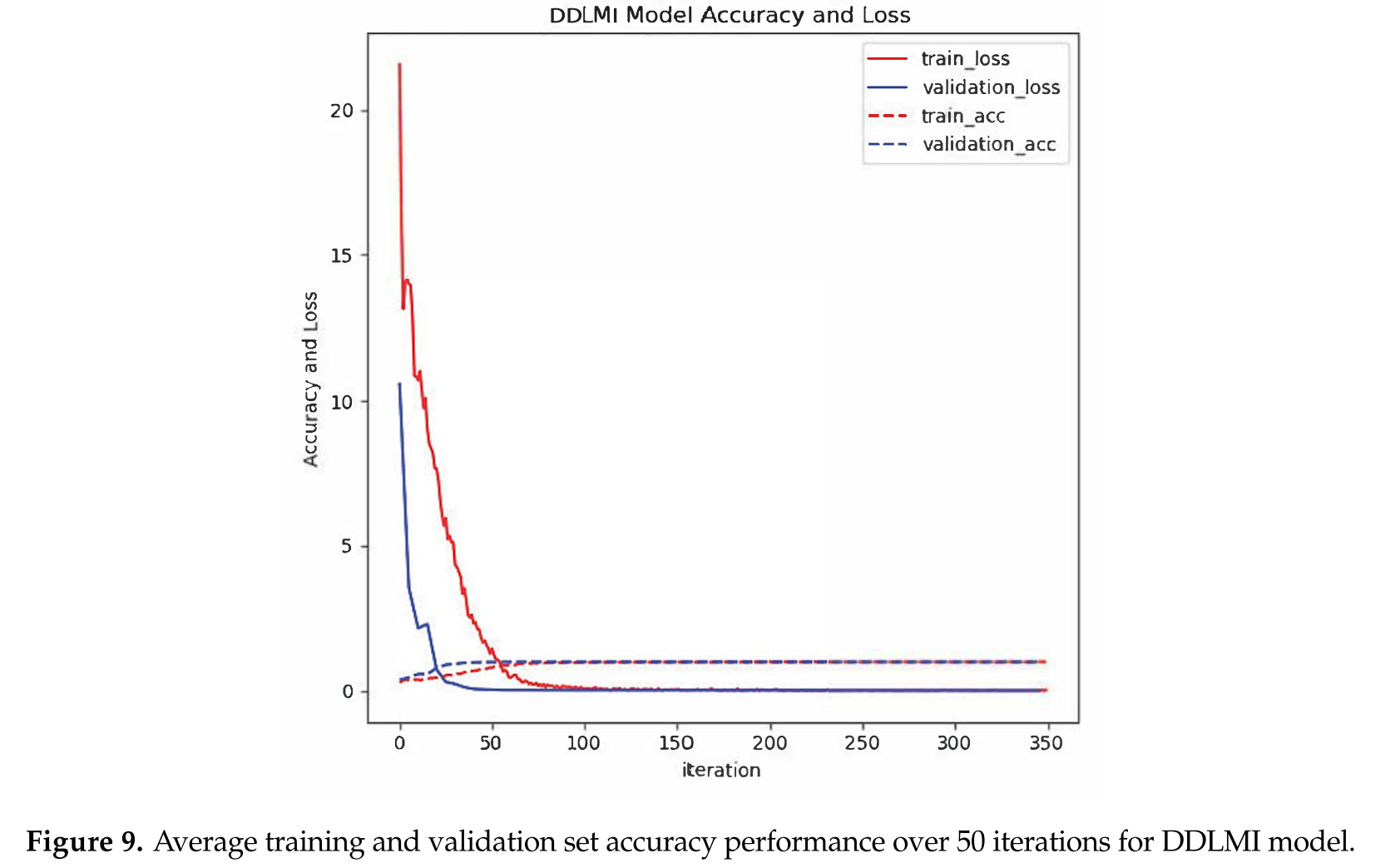
Performance Evaluation
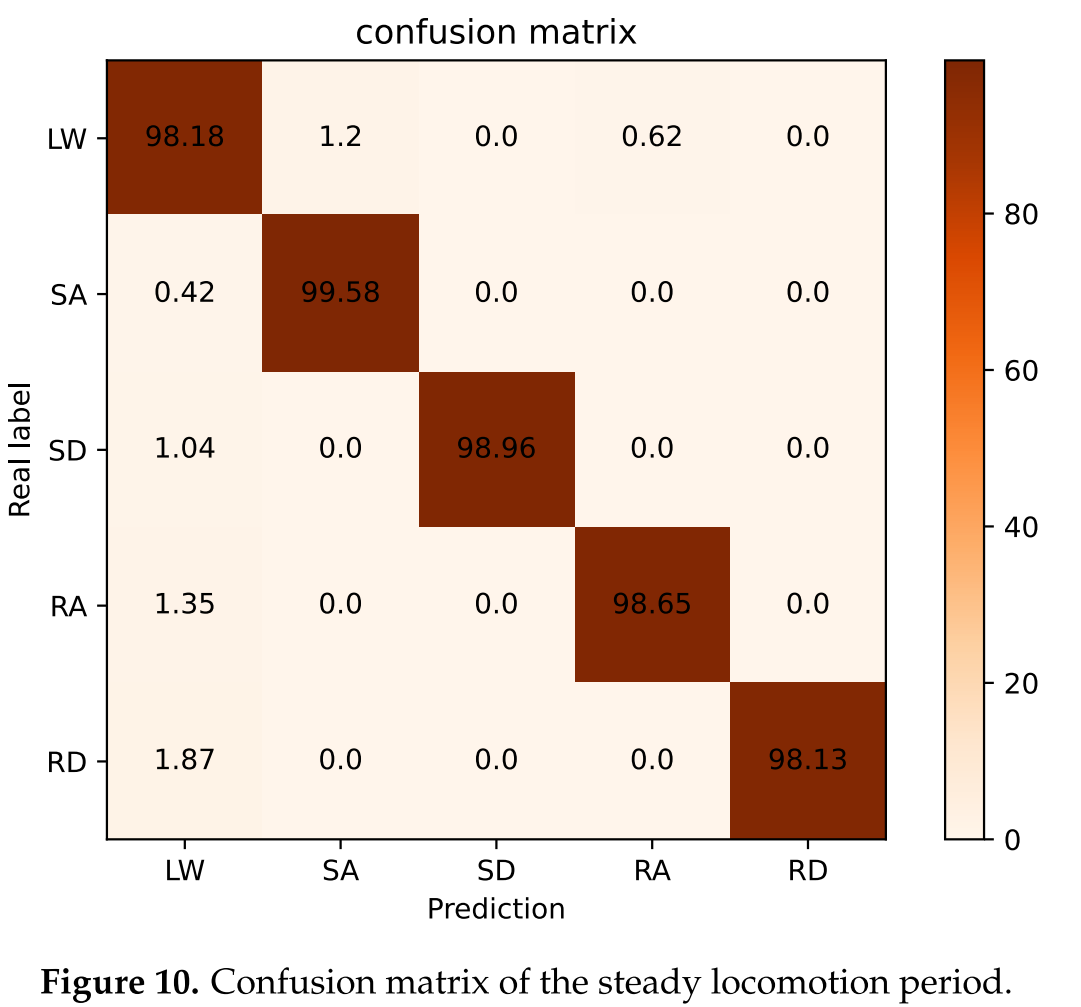
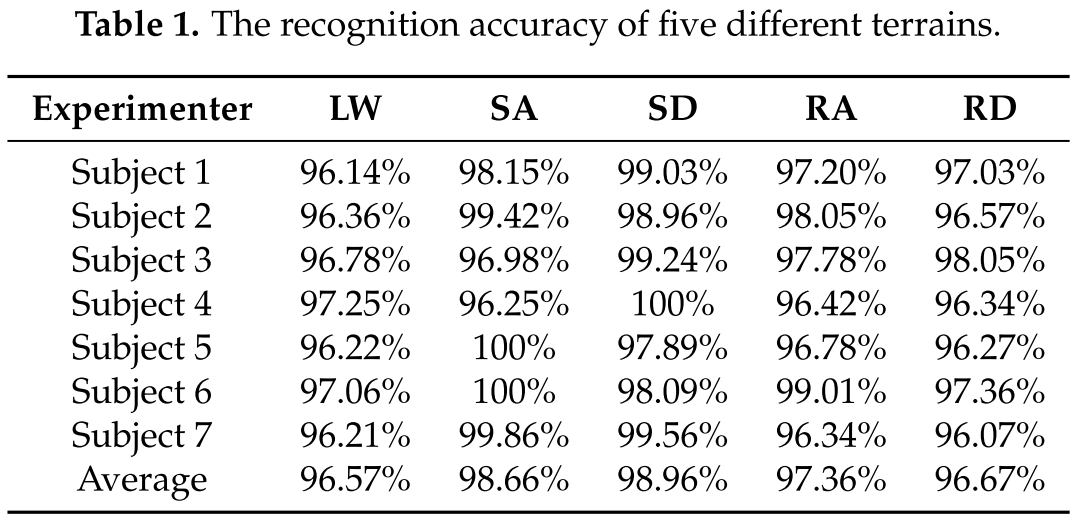
Steady Locomotion Period: the identification success rate $\text{ISR}=\frac{N_{\text{correct}}}{N_{\text{total}}}$; the confusion matrix
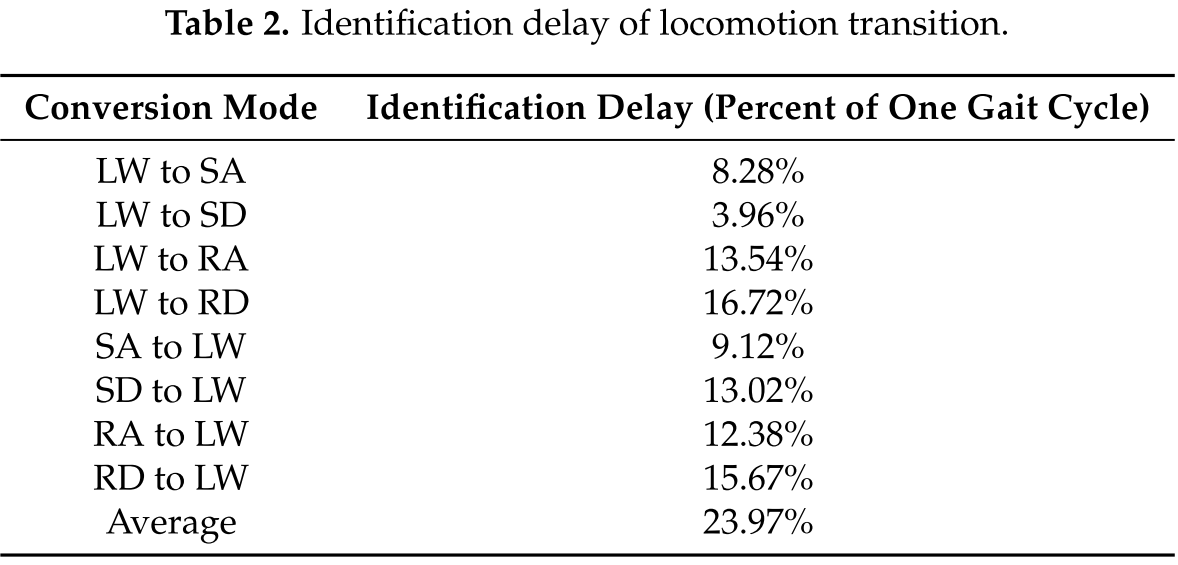
Locomotion Transition Period: to judge whether the conversion pattern recognition is timely; $D_{I}=\frac{T_{i}-T_{c}}{T} * 100 \%$ where $ T_{i} $ is the moment when locomotion transition is identified, $ T_{c} $ is the critical moment, the moment when the user starts to change the current locomotion mode, and $ T $ is the average time of a gait cycle.
Results
Highlights
sensors用得少;识别及预测transition
Thoughts/Comments
-
TODO这个intro部分涉及的还挺全面的,之后看一下
-
TODO 回头看一下基于interaction force具体是怎么做的
-
TODO 对IMU数据的处理&可靠性验证
The angle information used in this paper is directly output by IMU, and there is a 90-degree difference with the actual hip posture angle. Therefore, 90 degrees should be subtracted from the original angle information when compared with the attitude angle obtained by Vicon system dynamic capture in [25]. One-way ANOVA showed that there was no significant difference in F value at the level of a = 0.01. Therefore, the inertial measurement system used in this paper is reliable.
-
也用到了滑窗法增强数据