Daily Locomotion Recognition and Prediction: A Kinematic Data-Based Machine Learning Approach
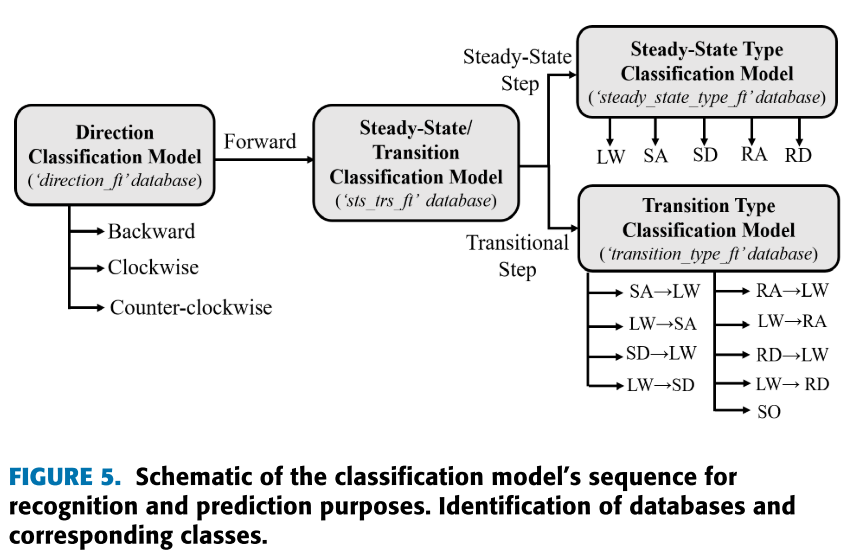
intention定义: locomotion modes (LMs; walking direction, level-ground walking, ascend and descend stairs, and ascend and descend ramps) and respective locomotion mode transitions(LMTs).
Research question
to propose an automatic, user-independent recognition and prediction tool using easily wearable kinematic motion sensors for innovatively classifying several LMs (walking direction, level-ground walking, ascend and descend stairs, and ascend and descend ramps) and respective LMTs.
Introduction
- EMG的一些drawback
- 之前的一些人的分类工作
- 它说预测的少,而且很少有达到“预”测
- 一些工作规定被试用a predefined limb进行transition
- a set of challenges
- 总之就是说这个工作前面做的人少而且有challenges并且没人只用kinematic data
Methods
Sensors: 7 IMUs
- 数据滤波: 1st order low- pass filter (exponential smoothing) with 0.5 as the smoothing factor and a cut-off of 10 Hz [13]. 一阶低通滤波器(指数平滑),平滑因子为0.5,截止频率为10hz
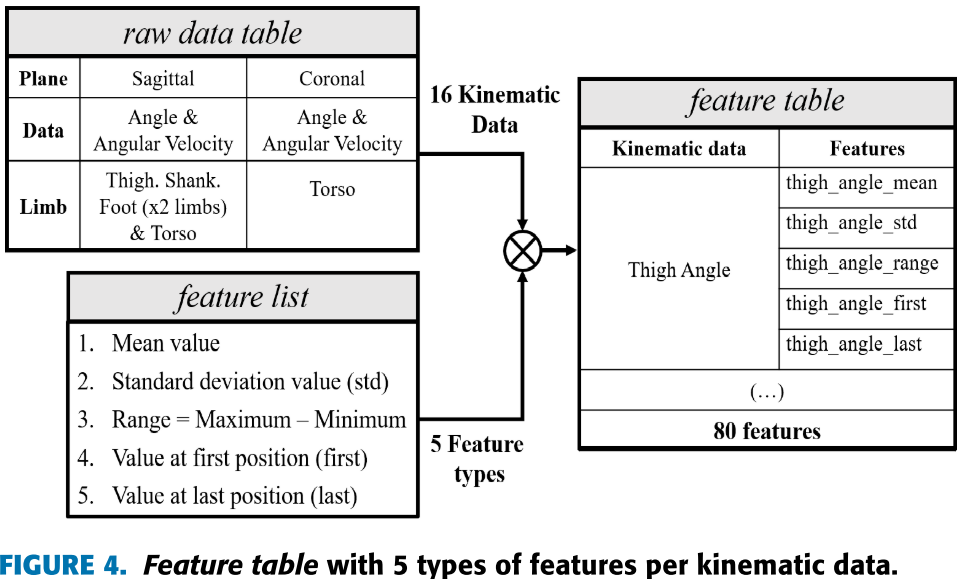
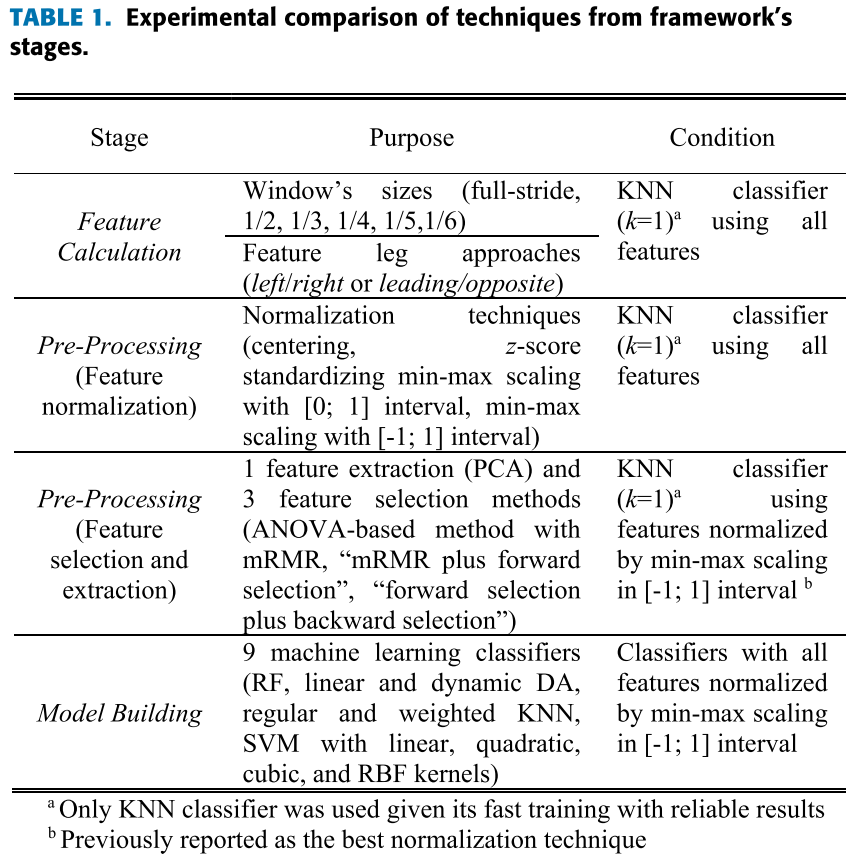
feature calculation
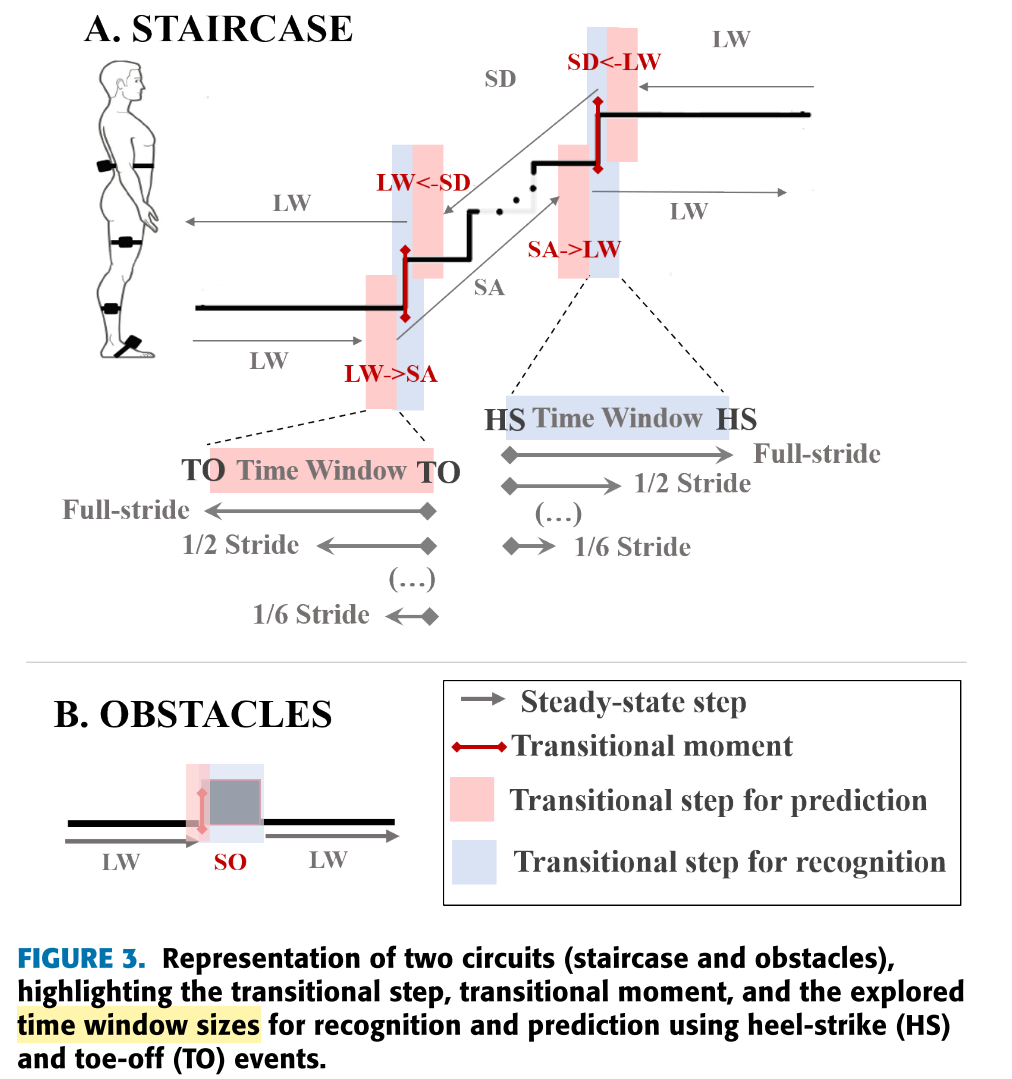
- feature是一个窗口的;也探究window size的影响
- feature两腿都有;两种方式:左腿右腿;前腿后腿the leading and opposite legs
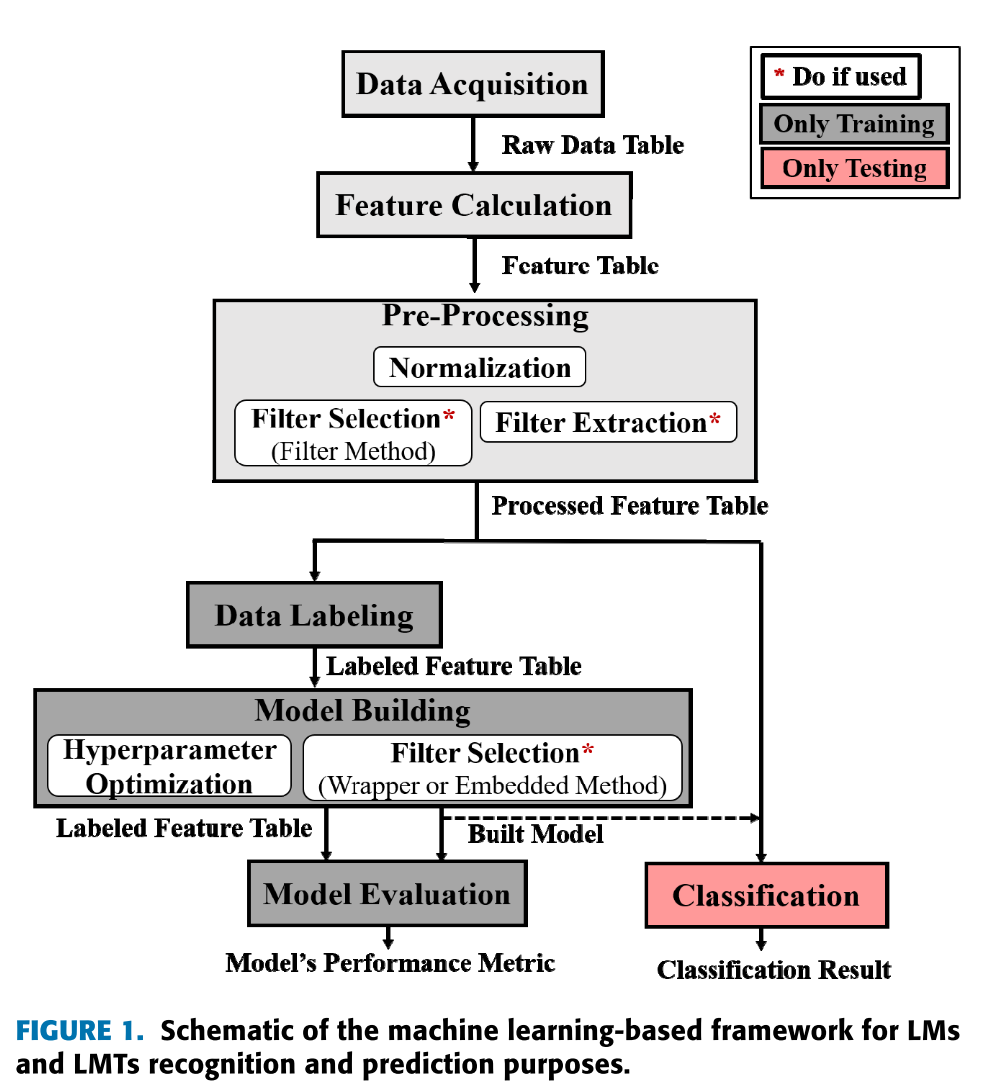
pre-processing
- normalization: compared different normalization techniques, namely centering, z-score standardization, and min-max scaling
- filter feature selection: minimum-redundancy maximum-relevancy (mRMR) algorithm to rank features in descending order according to their relevance [19]. Then, we used the ANOVA, starting on the highest-ranked feature, to assess which classes are distinguishable for the feature considering the feature’s mean and variance per class. This procedure was done until there are a set of features that distinguish between all classes. mRMR找强关联项; ANOVA去除冗余特征
- feature extraction: principal component analysis (PCA) considering the Horn’s Parallel Analysis as a cut-off criterium
data labeling
model building
- wrapper methods: mRMR排序,由高到低依次检验,如果有提升则加到feature set里; ‘‘forward selection plus backward selection’’,类似剪枝
- hyperparameter
实验
Mathew’s correlation coefficient (MCC) for both comparison and reporting of model’s performances due to its good representative properties of unbalanced classes
Results
The most effective machine learning configuration includes min-max scaling in [−1;1] interval and ‘‘mRMR plus forward selection algorithm’’ for feature normalization and dimensionality reduction, respectively, and Gaussian SVM classifier.
FEATURE CALCULATION ANALYSIS
识别: 使用左/右方法的全步幅最优;预测: leading/opposite approach and 1/4 fraction of gait stride yielded the best results
the interval from 1/4 stride’s fraction to the toe-off event (likely from terminal stance phase to preswing phase) contains relevant information for the user’s motion prediction.
FEATURE NORMALIZATION ANALYSIS
min-max scaling with the interval [−1;1] yielded the best results for recognition and prediction.
FEATURE SELECTION AND EXTRACTION ANALYSIS
- performed better in recognition than in the prediction
- an adequate dimensionality reduction method improved the effectiveness of the classifier com- pared to the inclusion of the entire dataset.
- mRMR was faster and more effective than the ‘‘forward selection’’ and ‘‘backward selection’’ methods
- the ANOVA was less effective due to the low number of selected features (2 to 3 features) to discern between the classes
- dimensionality reduction methods that depend on the built model outperformed the ones (as ANOV A and PCA) that consider neither the classification model nor the classification goal.
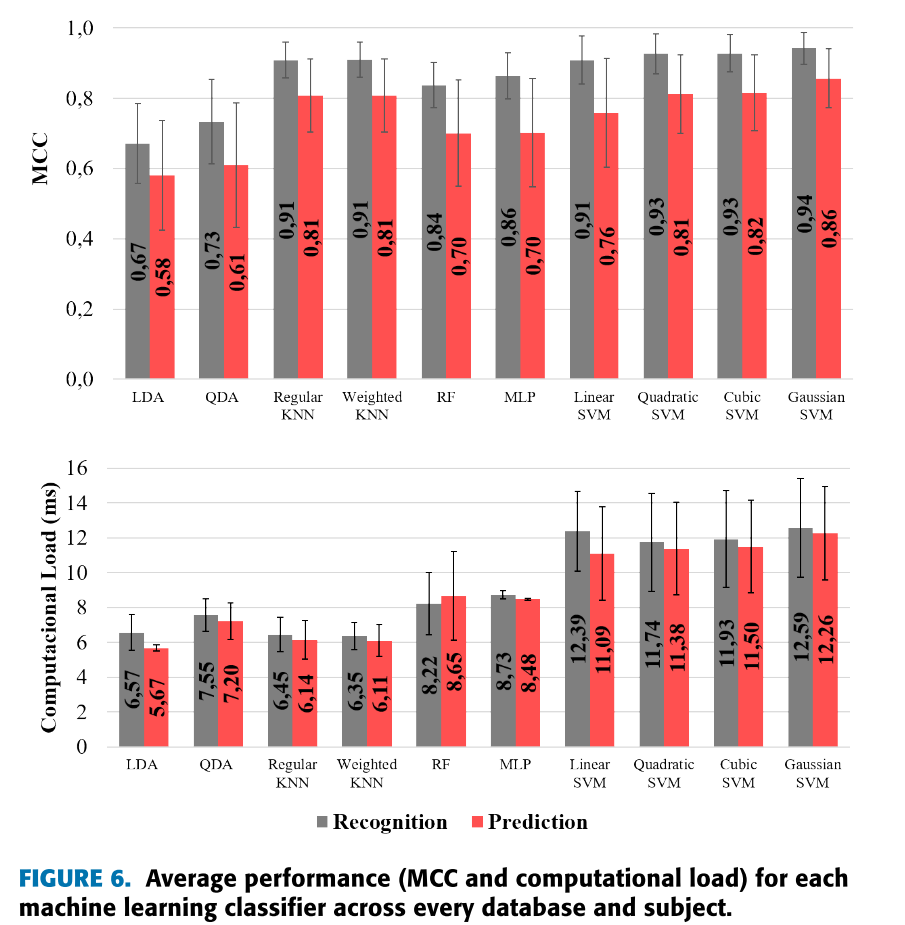
model building analysis
SVM classifier with a Gaussian kernel is an effective classifier to yield a benchmark tool for both recognition and prediction purposes, despite the higher computational burden than other classifiers.
Thoughts/Comments
EMG sensors present some drawbacks when compared to kinematic sensors, such as the lengthy and expert-based installation, difficulty for keeping them attached during the user’s daily locomotion, and the shifting electrodes may change EMG patterns and degrade the classification over time [2], [4], [6].
确实!👎
这种控制变量的形式应该之后也要用