Gait analysis 步态分析简述1
Factors and parameters 影响步态的因素
The gait analysis is modulated or modified by many factors, and changes in the normal gait pattern can be transient or permanent. The factors can be of various types:
- Extrinsic: such as terrain, footwear, clothing, cargo
- Intrinsic: sex, weight, height, age, etc.
- Physical: such as weight, height, physique
- Psychological: personality type, emotions
- Physiological: anthropometric characteristics, i.e., measurements and proportions of body
- Pathological: for example trauma, neurological diseases, musculoskeletal anomalies, psychiatric disorders
Parameters 描述步态的参数
The parameters taken into account for the gait analysis are as follows:
-
Step length 步长
-
Stride length 步幅
-
Cadence 节奏(Step rate; xx steps per minute)
-
Speed
-
Dynamic base
-
Progression line 渐进线
-
Foot angle
-
Hip angle
-
Squat performance
gait parameters:一种分类2
Joint angles
Gait events/Gait phases
initial and end contact(most common) (IC) initial contact; (LR) loading response; (MS) mid stance; (TS) terminal stance; (PS) pre-swing; (EC) end contact; (SW) swing
Spatiotemporal parameters
Stride Time , Step time, Stance time, Gait velocity, Cadence, Stride symmetry
Basic sciences – anatomy, physiology and biomechanics
Anatomy
| Term | Figure | ||
|---|---|---|---|
| directions reference planes |
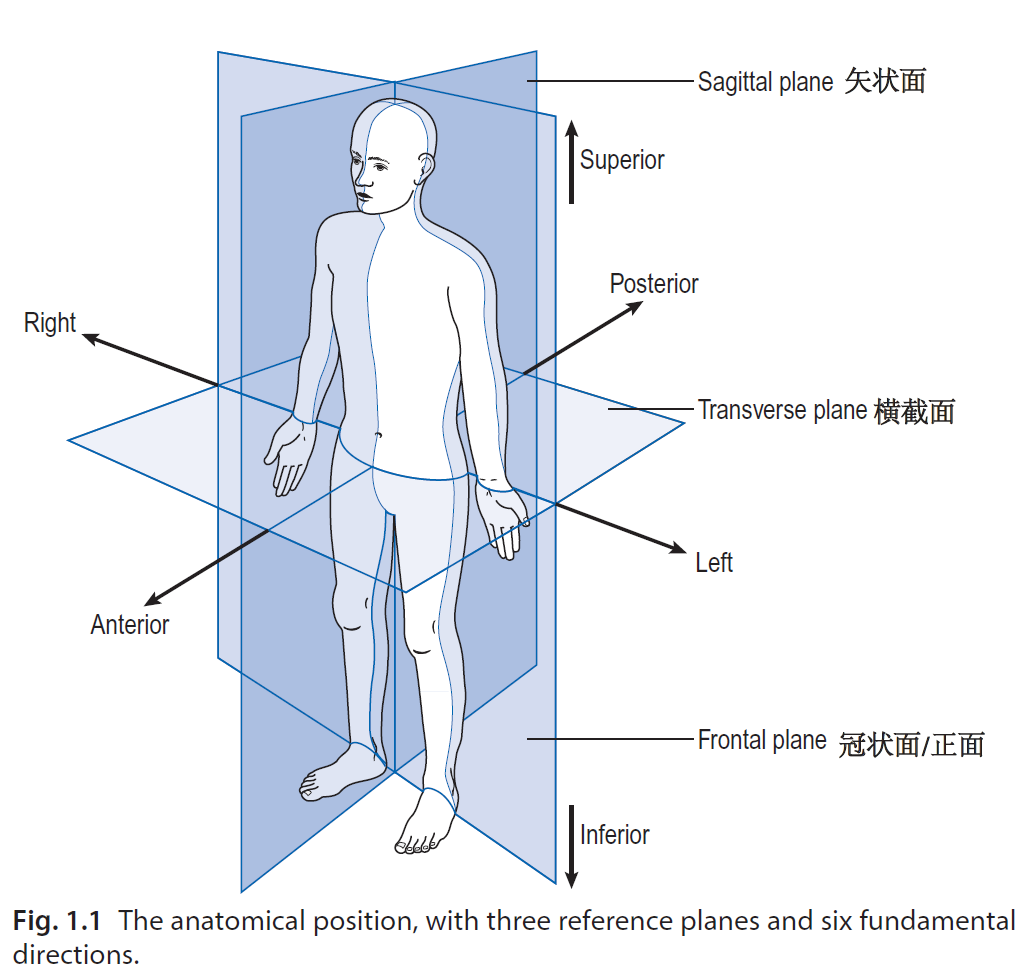
anterior posterior superior inferior(cephalad: towards the head and caudad: towards the ‘tail’ ) left right Medial 中间的 Lateral 侧向的 Proximal 近端的 Distal 远端的 Superficial Deep sagittal plane: any plane which divides part of the body into right and left portions; the median plane is the midline sagittal plane. frontal plane/coronal plane transverse plane/horizontal plane |
 |
|
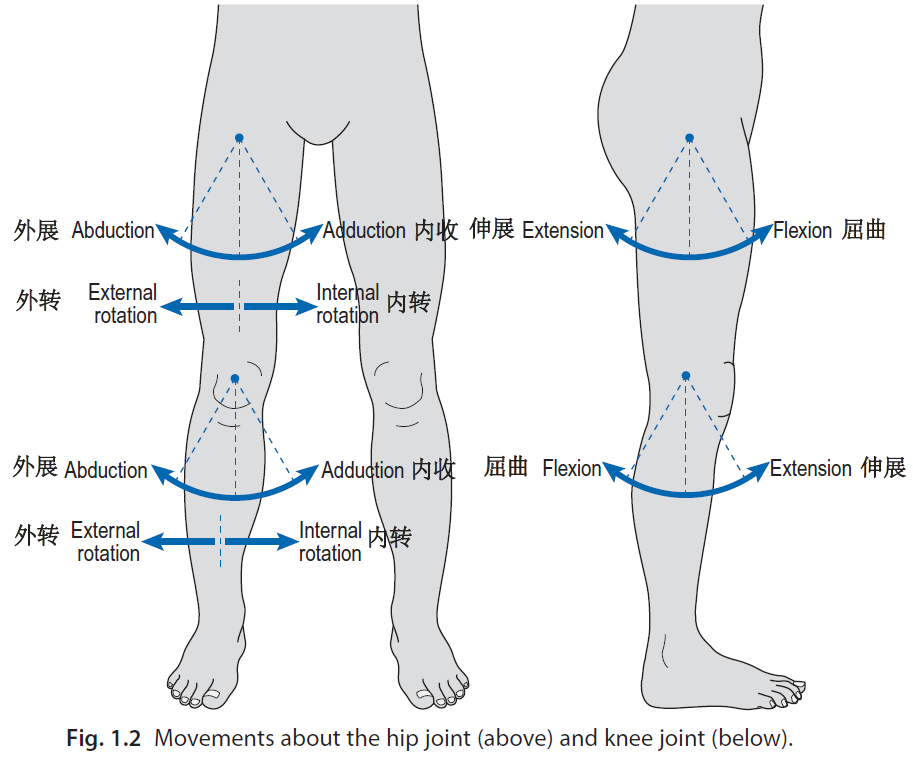
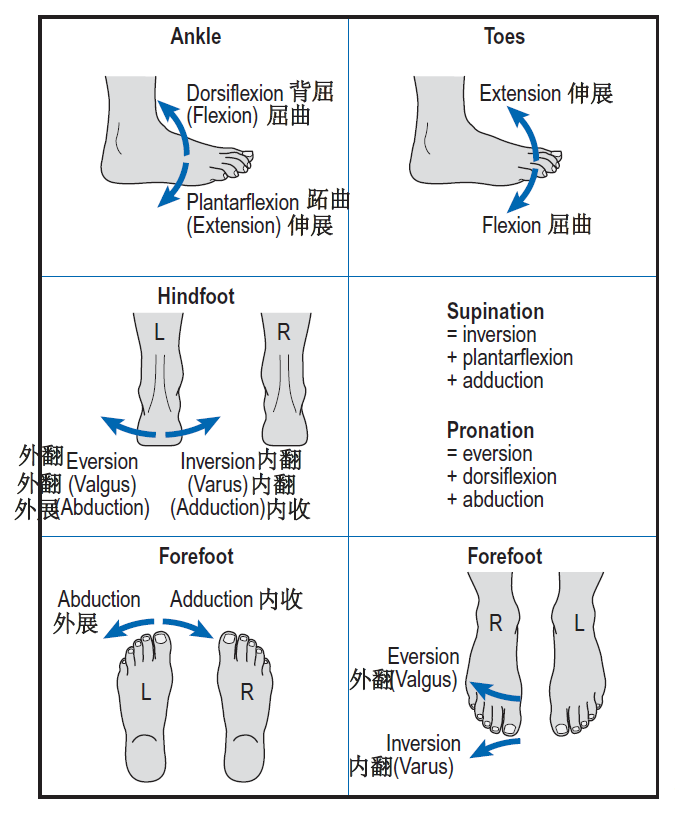
| movements | Flexion 弯曲/屈曲 extension 伸张 in the sagittal plane Abduction 外展 and adduction 内收 in the frontal plane Internal/medial and external/lateral rotation in the transverse plane Ankle dorsiflexion 背屈 and plantarflexion 跖屈 Varus 内翻 and valgus 外翻: an angulation of a joint towards or away from the midline(膝内翻 blow legs; 膝外翻 knock knees) Pronation 内转 and supination 外转: rotations about the long axis of the forearm or foot; pronation of both hands brings the thumbs together, supination brings the little fingers together Inversion of the feet brings the soles together; eversion causes the soles to point away from the midline. |
  |
|
| muscles | 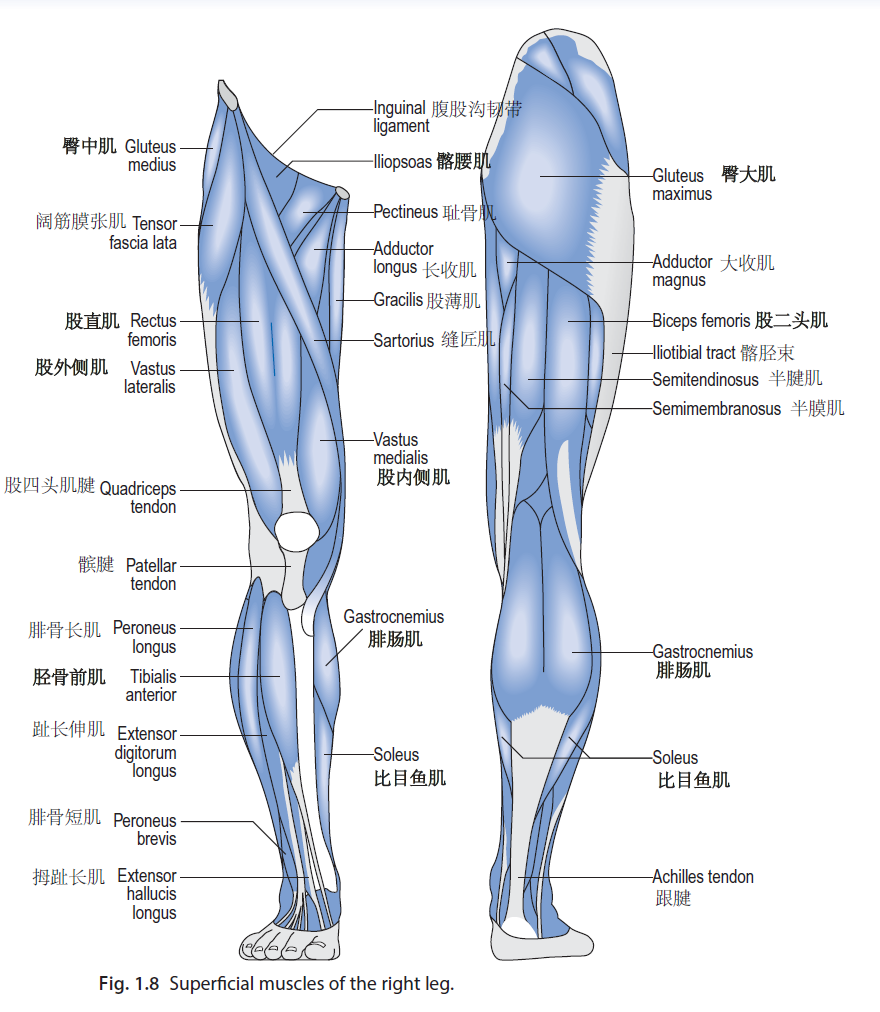 |
||
- 只作用于髋关节的肌肉
-
腰肌起源于腰椎的前部。髂肌起源于骨盆内部。这两个肌腱结合形成髂腰肌,插入股骨小转子;这两块肌肉的主要作用是弯曲髋。
-
臀大肌起源于骨盆后部插入股骨轴的后部靠近顶部;它伸展臀部。
-
臀中肌和臀小肌起源于骨盆一侧,插入股骨大转子;主要是髋关节外展。
-
大收肌、短收肌和长收肌均起源于骨盆的坐骨和耻骨。它们在股骨内侧插入一条线并内收髋。
-
股方肌、梨状肌、闭孔内肌、闭孔外肌、上孖肌和下孖肌起源于骨盆,插入股骨顶部附近;它们都向外旋转股骨,虽然大多数也有二次作用。
-
耻骨肌起源于骨盆的耻骨;它向外侧延伸并插入股骨前部,靠近小转子;它弯曲并内收髋。
-
上述列表中未提及股骨内旋转;它是由臀中肌、臀小肌、腰大肌、髂肌、耻骨肌和阔筋膜张肌(如下所述)共同完成的。
-
作用于髋关节和膝关节的肌肉
-
股直肌起源于骨盆髂前下棘周围并插入股四头肌腱;它可以弯曲髋,同时也是四头肌的一部分,四头肌是一组伸展膝盖的四块肌肉。
-
阔筋膜张肌起源于骨盆,靠近髂前上棘,插入髂胫束,髂胫束是一条由纤维组织组成的宽带,从大腿外侧延伸到腓骨头部。肌肉伸展臀部和膝盖。
-
缝匠肌是起源于骨盆髂前上棘并绕大腿前部的带状肌肉,在胫骨内侧的前部插入;主要是髋关节屈肌。
-
半膜肌和半腱肌是股后肌群中的两条肌肉;它们都起源于骨盆坐骨结节并插入胫骨内侧髁;他们伸展髋和弯曲膝盖。
-
股二头肌是股后肌群第三块肌肉;它有两个起源长头来自坐骨粗隆短头来自股骨轴的中间。它插入胫骨外侧髁,是髋关节伸肌和膝关节屈肌。
-
股薄肌沿着大腿内侧从耻骨延伸到胫骨内侧;它内收臀部,弯曲膝盖。
-
-
只作用于膝关节的肌肉
-
股内侧肌、股中间肌和股外侧肌是股四头肌的三个组成部分。它们都起源于股骨的上部,分别位于股骨的内侧、前部和外侧。股四头肌的第四部分是股直肌,如上所述。这四块肌肉结合在一起形成四头肌肌腱。它包围着髌骨并延伸到髌骨肌腱之外,髌骨肌腱插入胫骨结节。四头肌是唯一能伸展膝盖的肌肉。
-
腘肌是膝关节后的一块小肌肉;它可以弯曲,并通过在屈曲开始时向内旋转胫骨来帮助解开(unlock)膝关节。
-
-
作用于膝关节和踝关节的肌肉
-
腓肠肌起源于股骨内外侧髁后方;它的跟腱与比目鱼(有时也与跖肌)的跟腱相连,形成跟腱,并插入跟骨的后部。这些肌肉的主要作用是跖屈踝关节,尽管腓肠肌也是膝关节的屈肌。
-
跖肌是从股骨外侧髁延伸到跟骨的腓肠肌深处的一块非常细长的肌肉;这是踝关节无力的屈肌。
-
-
作用于踝关节和距下关节的肌肉
- 比目鱼肌起源于胫骨、腓骨和小腿深层肌肉的后表面。它的跟腱与腓肠肌(有时是跖肌)的跟腱相连,使踝关节跖屈。比目鱼肌和腓肠肌一起被称为小腿三头肌。
- 拇趾长肌、趾长伸肌、胫骨前肌和腓骨第三肌构成胫骨前肌群。它们起源于胫骨和腓骨的前部以及骨间膜。前两种是插入脚趾,脚趾延伸;后两者插入跗骨,在内侧(胫前肌)或外侧(第三腓骨)抬起中足。胫前肌是踝关节的主要背屈肌;其他的都是弱背屈肌。
- 拇长屈肌、指长屈肌、胫骨后肌、腓骨长肌和腓骨短肌是小腿深肌,均起源于胫骨、腓骨和骨间膜的后方。前两个是脚趾的屈肌;腓骨在外侧胫骨后外侧在内侧并将其翻转。这五块肌肉都是踝关节跖屈肌。
-
足内肌肉
-
趾短伸肌和背肌间肌位于足背;前者肌肉伸展脚趾,后者肌肉外展和弯曲脚趾。
-
趾短屈肌、拇外展肌、小指外展肌形成足底浅层;它们分别弯曲脚趾和外展大脚趾和小脚趾。
-
副屈肌、幻短屈肌和小指短屈肌在足底形成中间层;在它们之间,它们弯曲所有的脚趾。
-
拇收肌分为斜头和横头两部分。它内收大脚趾。
-
足底肌间质和蚓状肌位于足底最深处;前者弯曲脚趾,后者弯曲近端指骨,伸展远端指骨。
-
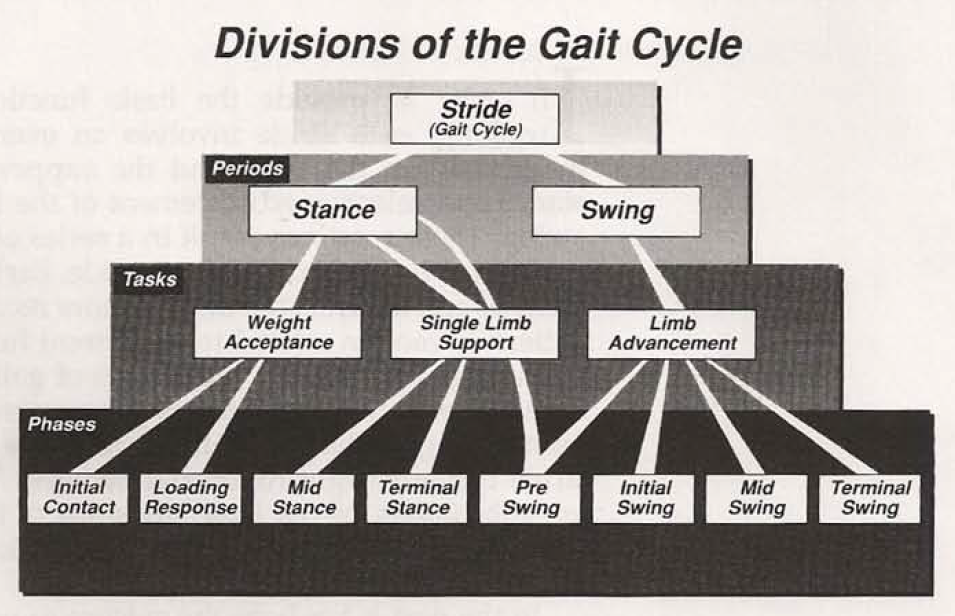
Gait Analysis: three basic approaches3
The simplest system subdivides the cycle according to the variations in reciprocal floor contact by the two feet. A second method uses the time and distance qualities of the stride. The third approach identifies the functional significance of the events within the gait cycle and designates these intervals as the functional phases of gait.
Gait cycle (GC)
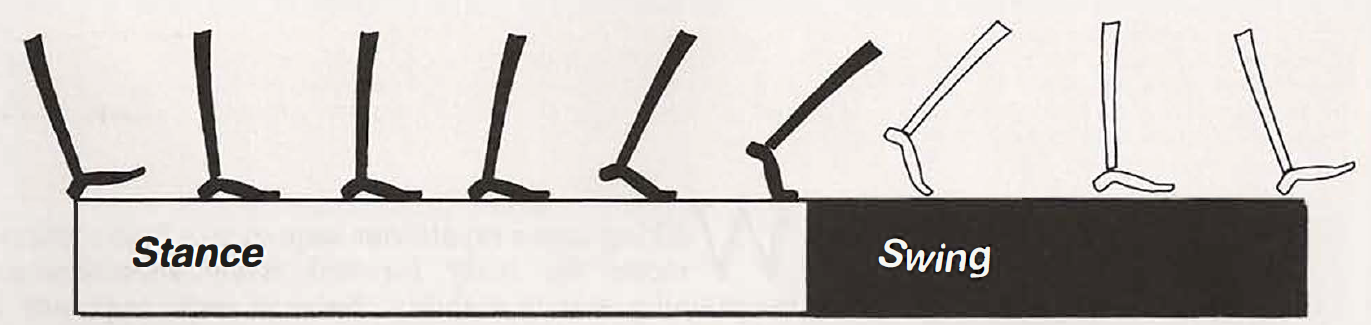
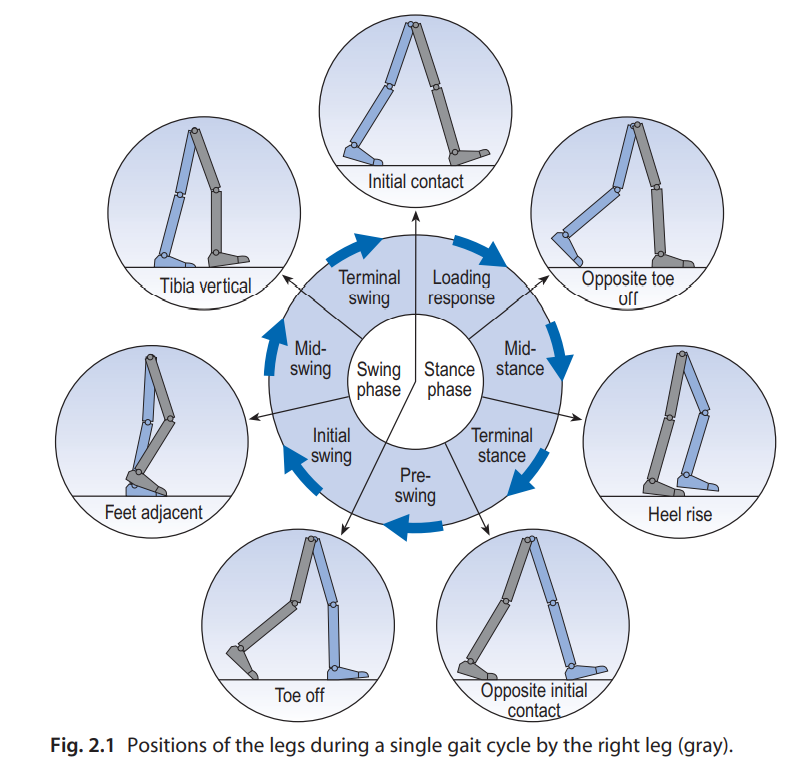
One gait cycle (a single sequence of these functions by one limb) can be divided into two phases, stance (ST) and swing (SW), which can be subdivided into 5 and 3 phases, respectively.
Stance is the term used to designate the entire period during which the foot is on the ground. Stance begins with initial contact.
-
IC initial contact 对于没有某一类型行走障碍的人来说就是 HS heel strike.
-
Subdivided into 3 intervals according to the sequence of floor contact by the two feet. (根据两腿所在的运动相划分,与phase不同)
- Both the start and end of stance involve a period of bilateral foot contact with the floor (double stance; term “support” is avoided for an unequal sharing of body weight by the two feet), while the middle portion of stance has one foot contact.
- Initial double stance/Loading response(10%) begins the gait cycle. It is the time both feet are on the floor after IC.
- Single limb support(40%) begins when the opposite foot is lifted for swing. (所以Swing和Single limb support占比相同)
- Terminal double stance(10%) begins with floor contact by the other foot (contralateral initial contact) and continues until the original stance limb is lifted for swing (ipsilateral toe-off).
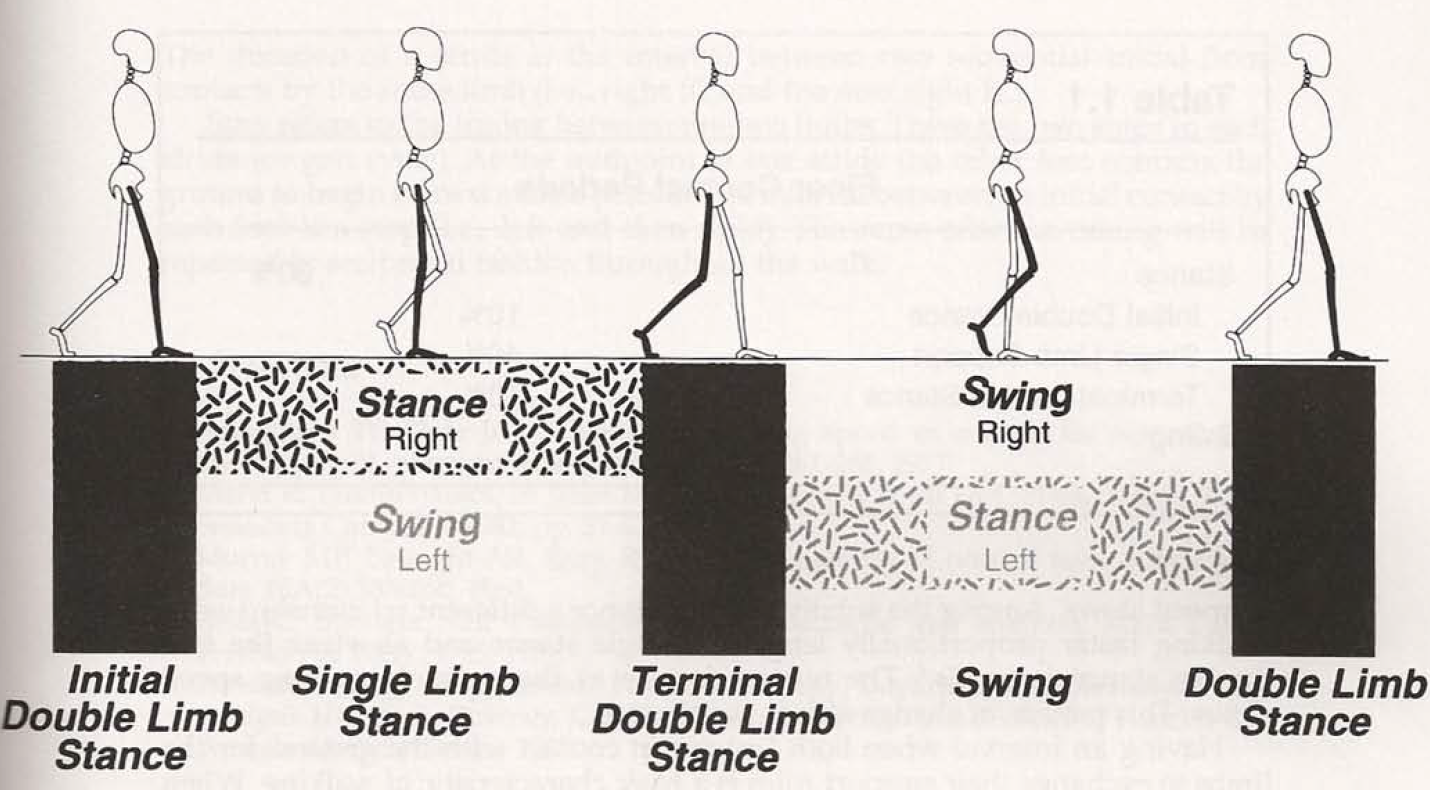
Swing applies to the time the foot is in the air for limb advancement. Swing begins as the foot is lifted from the floor (toe-off).
Gait Cycle & Speed
-
total stance and swing times和速度负相关;The change in stance and swing times becomes progressively greater as speed slows.
-
Subdivisions of stance : 速度与Single stance interval/Swing占比正相关;curvilinear pattern of change.
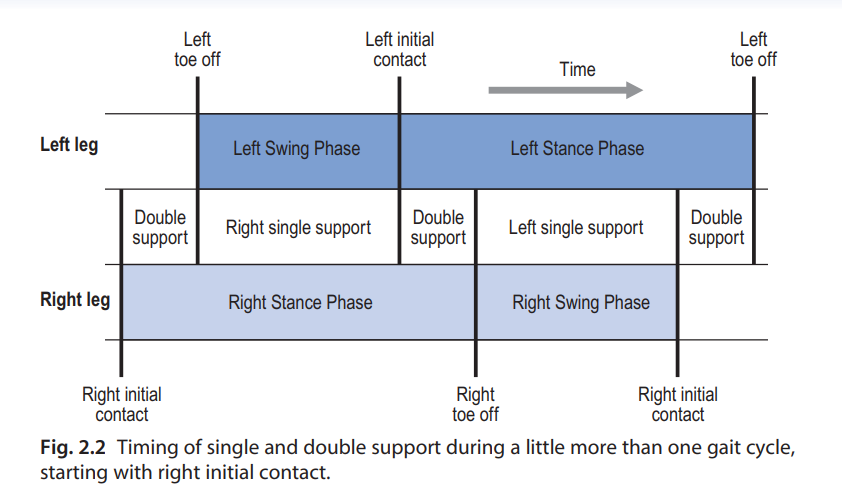
Having an interval when both feet are in contact with the ground for the limbs to exchange their support roles is a basic characteristic of walking. When double stance is omitted, the person has entered the running mode of locomotion.
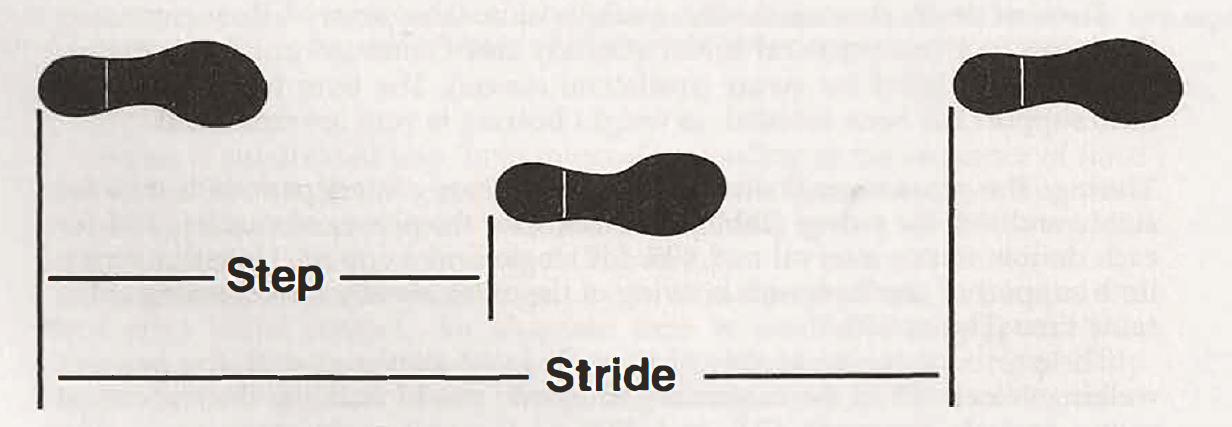
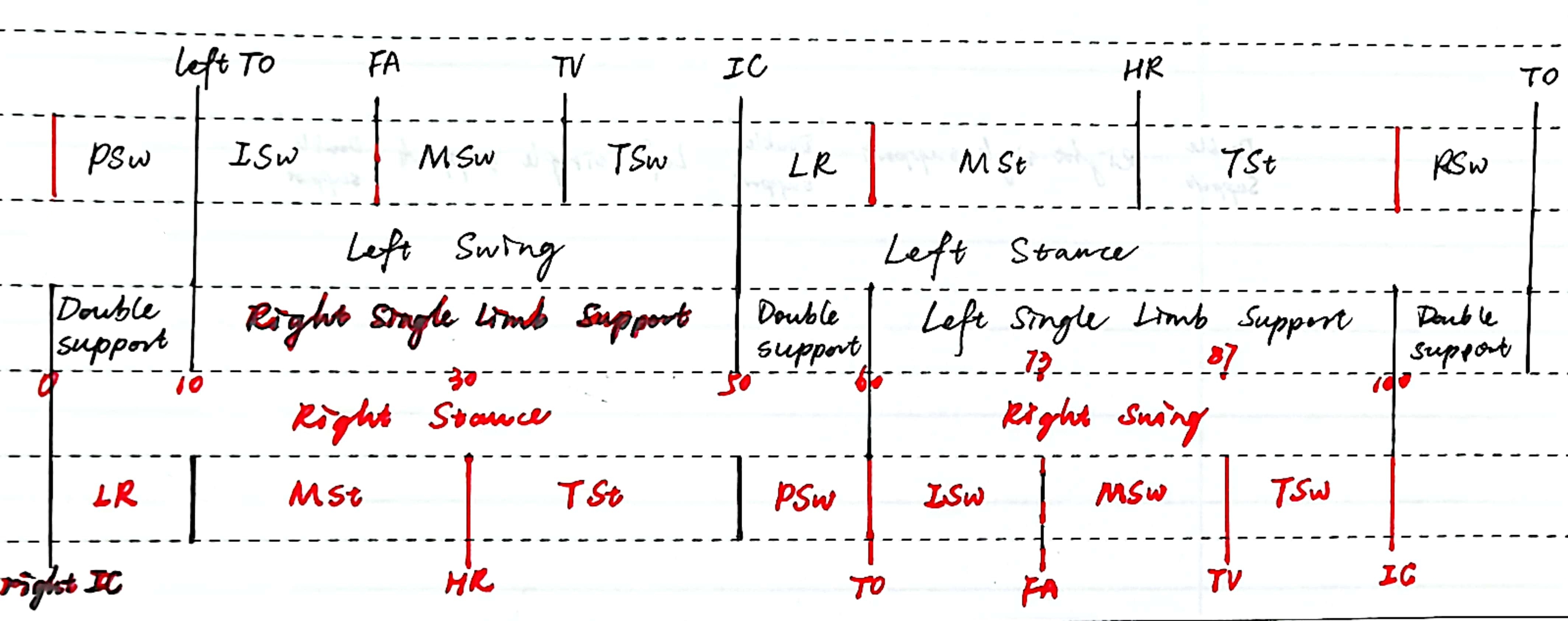
Stride and Step
Stride is the equivalent of a gait cycle. It is based on the actions of one limb.The duration of a stride is the interval between two sequential initial floor contacts by the same limb (i.e., right IC and the next right IC).
Step refers to the timing between the two limbs. There are two steps in each stride (or gait cycle). At the midpoint of one stride the other foot contacts the ground to begin its next stance period. The interval between an initial contact by each foot is a step (i.e., left and then right). The same offset in timing will be repeated in reciprocal fashion throughout the walk.
Gait Phases
Gait events
- IC Initial contact 对于没有某一类型行走障碍的人来说就是 HS heel strike.
- OT Opposite toe off
- HO/HR Heel rise/off
- OI Opposite initial contact
- TO Toe off
- FA Feet adjacent
- TV Tibia vertical
…(FO foot off, FF foot flat)
Tasks
The phases of gait also provide a means for correlating the simultaneous actions of the individual joints into patterns of total limb function. 联系关节模式和运动
Each of the eight gait phases has a functional objective and a critical pattern of selective synergistic motion to accomplish this goal.
Weight acceptance (WA) begins the stance period and uses the first two gait phases (IC initial contact and LR loading response).
Single limb support (SLS) continues stance with the next two phases of gait (MSt mid stance and TSt terminal stance).
Limb advancement(LA) begins in the final phase of stance (pre-swing) and then continues through the three phases of swing (ISw initial swing,MSw midswing and TSw terminal swing).
7 gait phases (Perry)
| Stance | Swing |
|---|---|
| Loading response Mid-stance Terminal stance Pre-swing |
Initial swing Mid-swing Terminal swing |
| Phase | Term | Interval | Figure(the reference limb shaded) | Beginning & ending events | Phase of the other leg | movements of joints |
|---|---|---|---|---|---|---|
| 0 | Initial Contact (IC) | 0-2% | 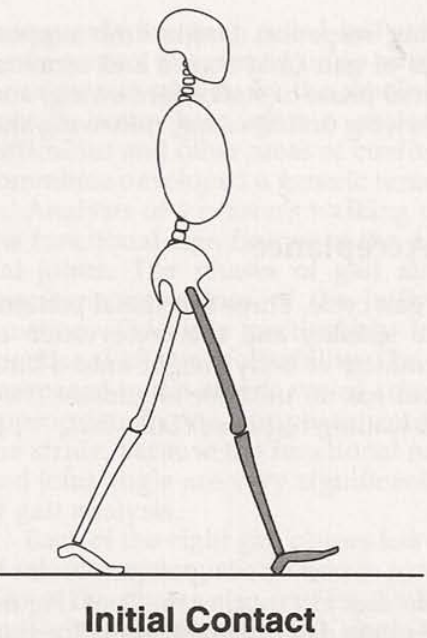 |
/ | end of TSt | hip flexed; knee extended; ankle dorsiflexed to neutral. |
| 1 | Loading response (LR) | 0-10% |  |
IC & (contralateral)TO/OT | PSw | knee flexed with the heel as a rocker for shock absorption. Ankle plantar flexion limits the heel rocker by forefoot contact with the floor. |
| 2 | Mid-stance (MSt) | 10-30% | 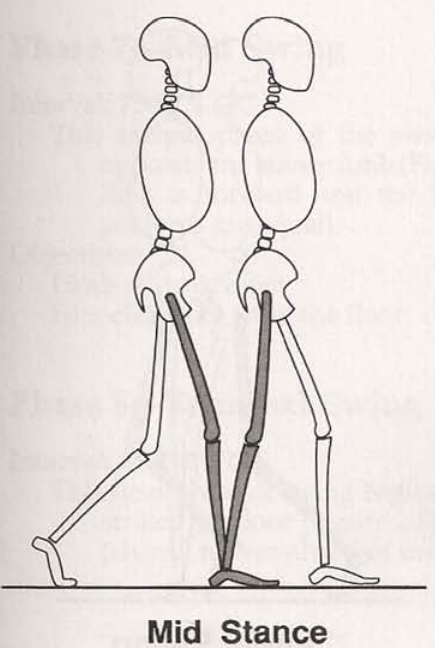 |
OT & HR | ISw & early MSw | the limb advances over the stationary foot by ankle dorsifiexion (ankle rocker) while the knee and hip extend. |
| 3 | Terminal stance (TSt) | 30-50% | 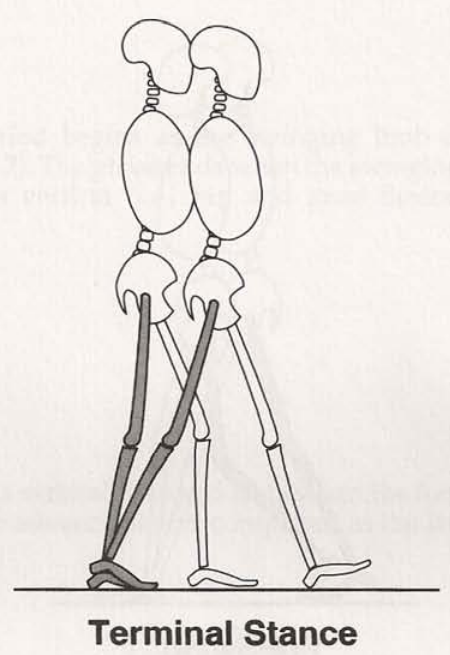 |
HR & (contralateral)IC/OI | late MSw & TSw | the heel rises and the Iimb advances over the forefoot rocker. The knee increases its extension and then just begins to flex slightly.Increased hip extension puts the Iimb in a more trailing position. |
| 4 | Pre-swing (PSw) | 50-60% | 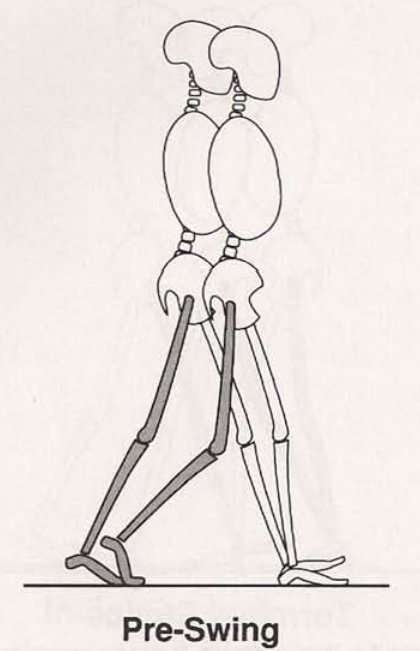 |
OI & TO | LR | The reference limb responds with increased ankle plantar flexion. greater knee flexion and loss of hip extension. |
| 5 | Initial swing (ISw) | 60-73% | 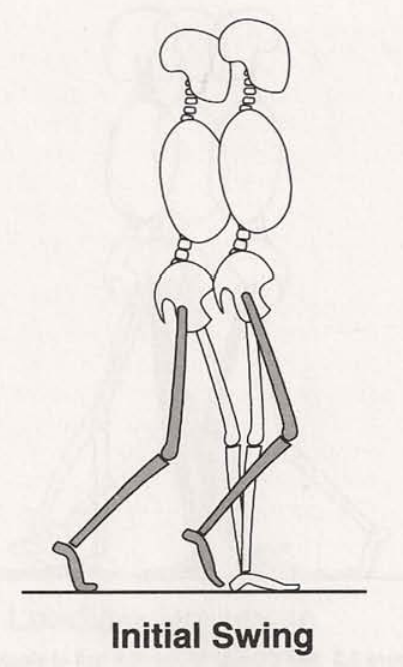 |
TO & FA | early MSt | The foot is lifted and limb advanced by hip flexion and increased knee flexion. The ankle only partially dorsiflexes. |
| 6 | Mid-swing (MSw) | 73-87% | 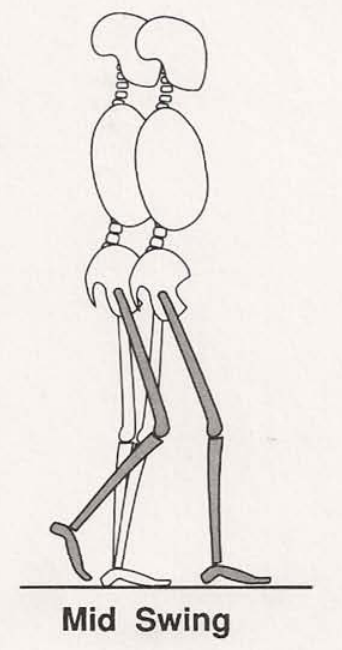 |
FA & TV | late MSt & early TSt | Advaneement of the limb anterior to the body weight line is gained by further hip flexion. The knee is allowed to extend in response to gravity while the ankle continues dorsiflexing to neutral. |
| 7 | Terminal swing (TSw) | 87-100% | 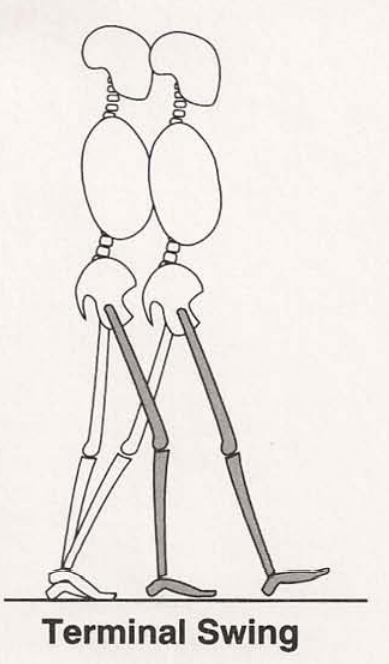 |
TV & IC | late TSt | limb advancement is completed by knee extension. The hip maintains its earlier flexion. and the ankle remains dorsiflexed to neutral. |
7 gait phases (Michael W. Whittle)
Basic Functions
上身passenger 下面locomotor(涉及11个关节) Passenger head, neck, trunk and arms 对运动影响不大 Locomotor Functions
- Propulsion
- Stance Stability
- Shock Absorption
- Energy Conservation
不同的function对应的重心位置和关节角(TODO 以及肌肉工作)不同,随phase的变化也不同,详见此书3p19-p47
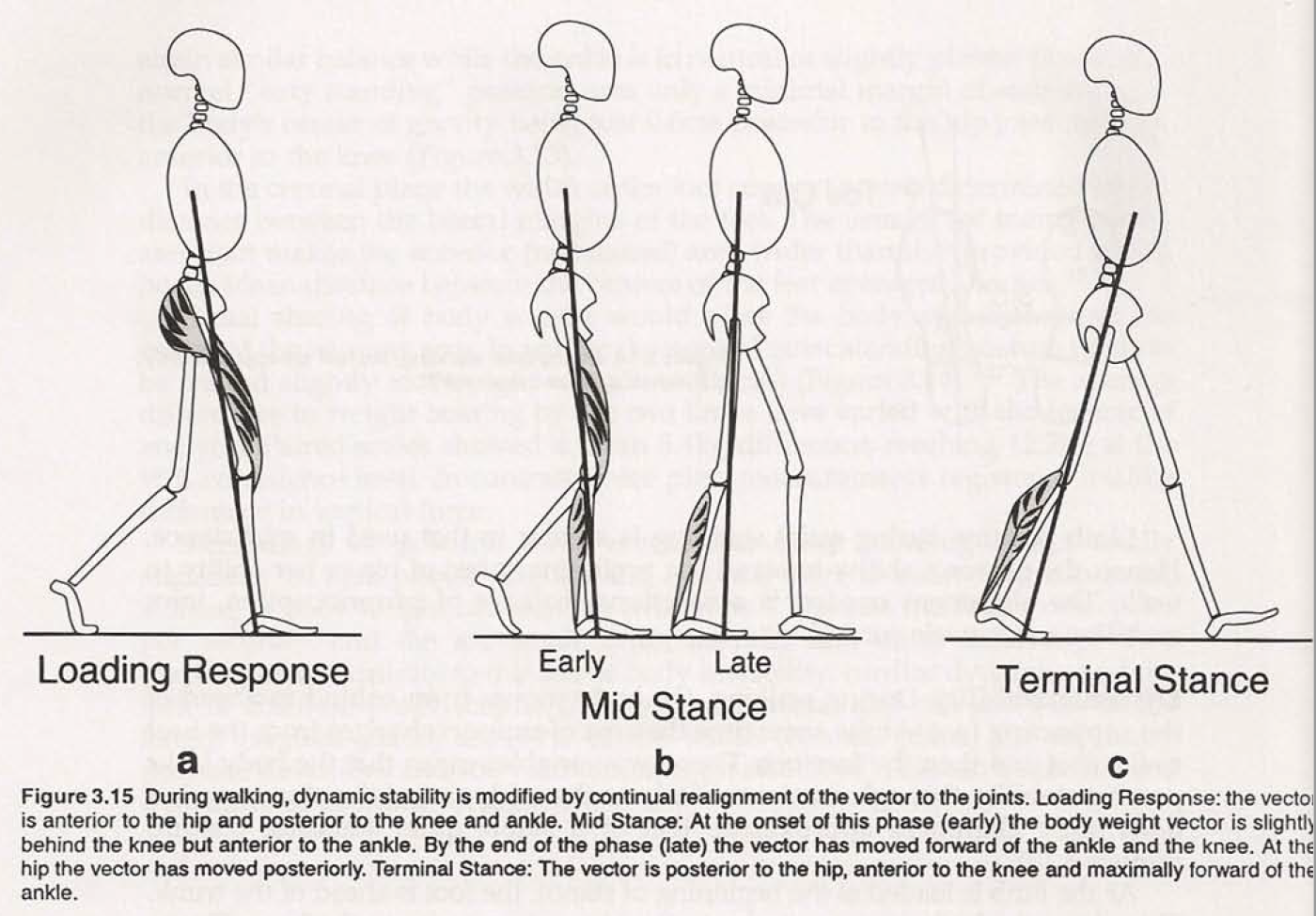
Stability
- beginning of stance
- the body vector anterior to the hip and posterior to the knee
- A flexion torque is created at both joints, necessitating active extensor muscle response to restrain the fali of body weight.
- During mid stance
- the body advances to a position over the supporting foot. This reduces the flexion torques to zero.
- Continued advancement of the body over the supporting foot gradualiy introduces passive extension at the hip and knee. At the same time body weight moves ahead of the ankle and thus introduces a new area of postural instability. Now active control by the plantar flexor muscles is needed to restrain the forward fall of body weight.
Propulsion
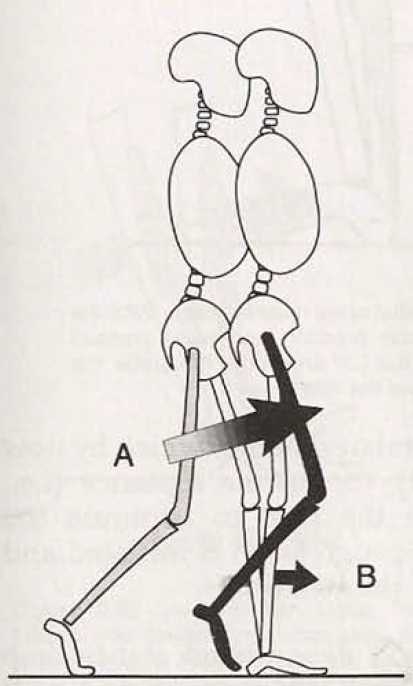
- Forward fall of body weight is used as the primary propelling force. Throughout stance, momentum is preserved by a pivotal system created by the foot and ankle.
- Forward swing of the contralateral limb provides a second pulling force. This force is generated by accelerated advancement of the limb and its anterior alignment. The sum of these actions provides a propelling force at the time residual momentum in the stance limb is decreasing. It is particularly critical in mid stance to advance the body vector past the vertical and again create a forward fall position. At the end of the step the falling body weight is caught by the contralateral swing limb, which by now has moved forward to assume a stance role.
- The Progression Cycle
- Heel rocker
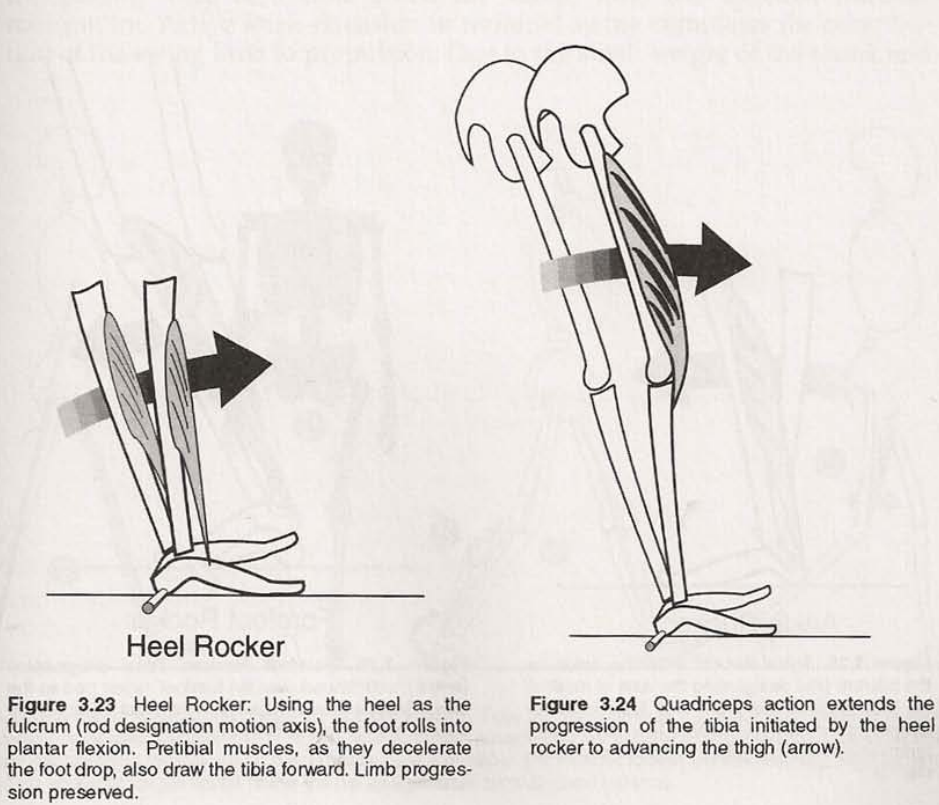
- pretibial muscles: restrain the rate of foot drop also creates a tie to the tibia that draws the leg forward.
- quadriceps: restrain the rate of knee flexion and ties the femur to the tibia.
- Ankle rocker
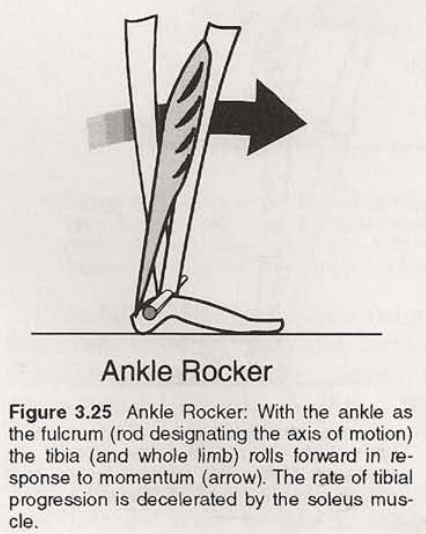
- tibia continues its advancement by passive ankle dorsiflexion in response to the momentum
- soleus: decelerate tibial progression(to make the tibia a stable base for knee extension)
- soleus&gastrocnemius: allow tibial advancement
- Forefoot rocker
- Middle stance
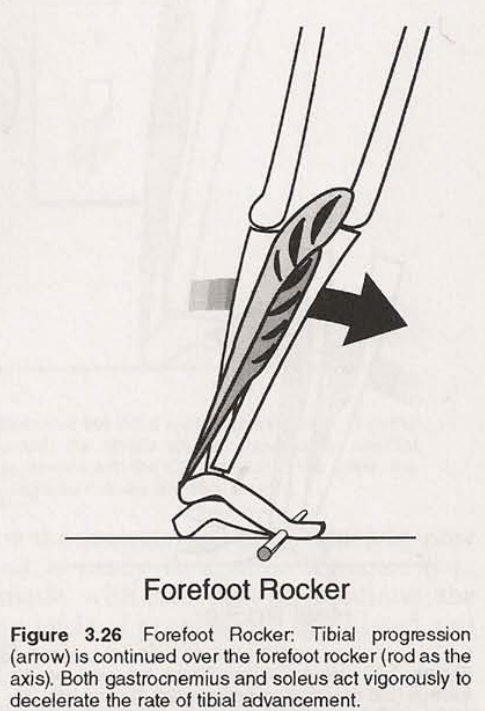
- Progression is accelerated as body weight falls beyond the area of foot support.
- gaslrocnemius&soleus: act vigorously to decelerate the rate of tibial advancement.
- Pre-swing knee flexion
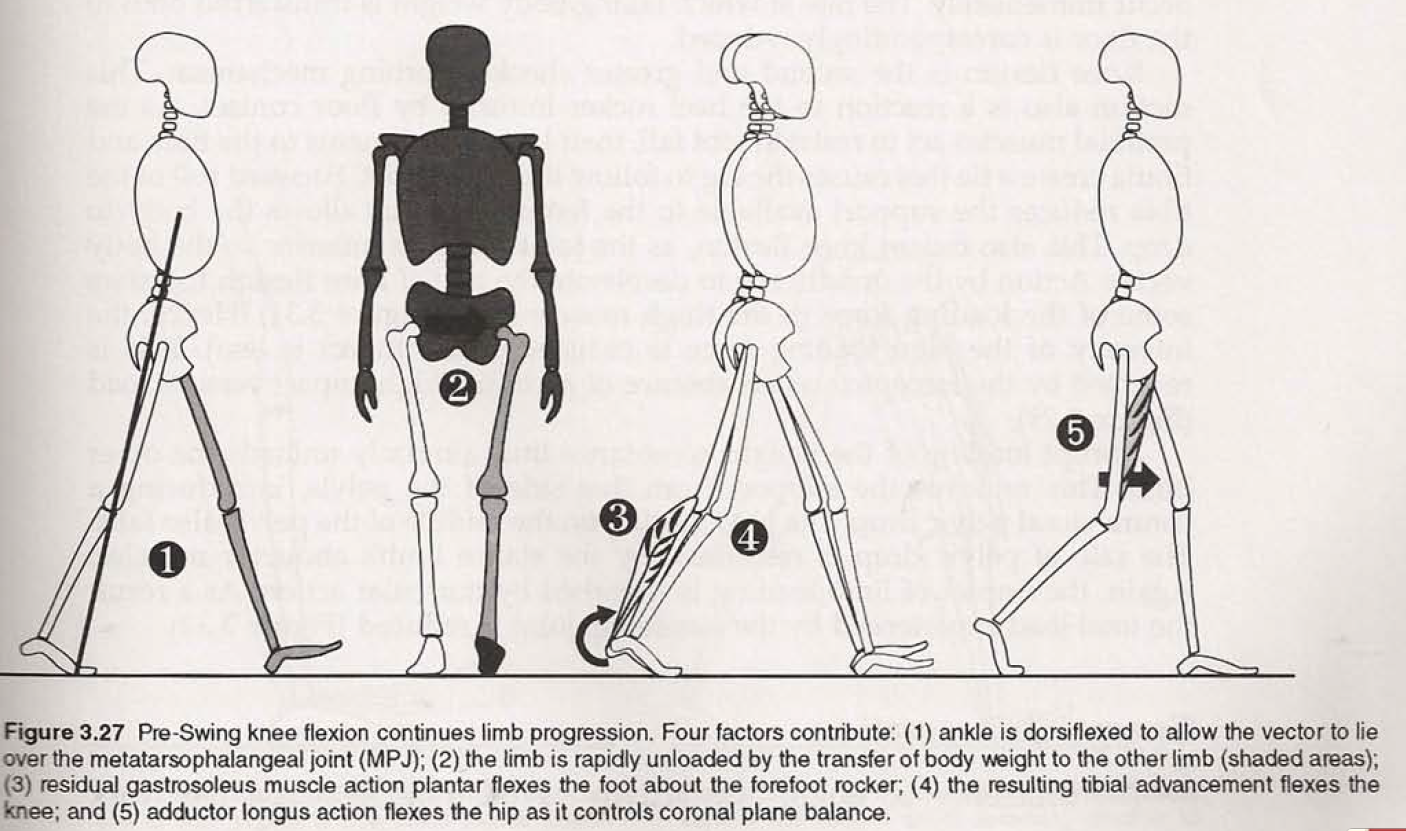
- The base of the body vector is at the metatarsal heads and then passes through the center of the knee joint, so there no longer are stabilizing forces acting on the foot or knee.
- Also, the limb is being rapidly unloaded by a transfer of body weight to the other foot.
- Residual gastrosoleus muscle action pivots the foot about the metatarsophalangeal (MP) joint. The result is simultaneous ankle plantar flexion and knee flexion.
- At the same time the adductors acting to restrain medial fall of the body also flex the hip.
- Swing phase
- hip flexion (initial swing phase)
- The progressional effect of the forward swinging limb is used by the weight-bearing limb during the early portion of its mid stance phase.
- knee extension
- The combination of knee extension and further thigh advancement in mid swing adds tibial weight to the limb mass that is forward of the stance limb axis. This change in swing limb alignment continues the pulling force at a time when the stance limb has minimal intrinsic momenturn. Active knee extension in terminal swing completes the contribution of the swing limb to propulsion.
- hip flexion (initial swing phase)
- Middle stance
- Heel rocker
Shock Absorption
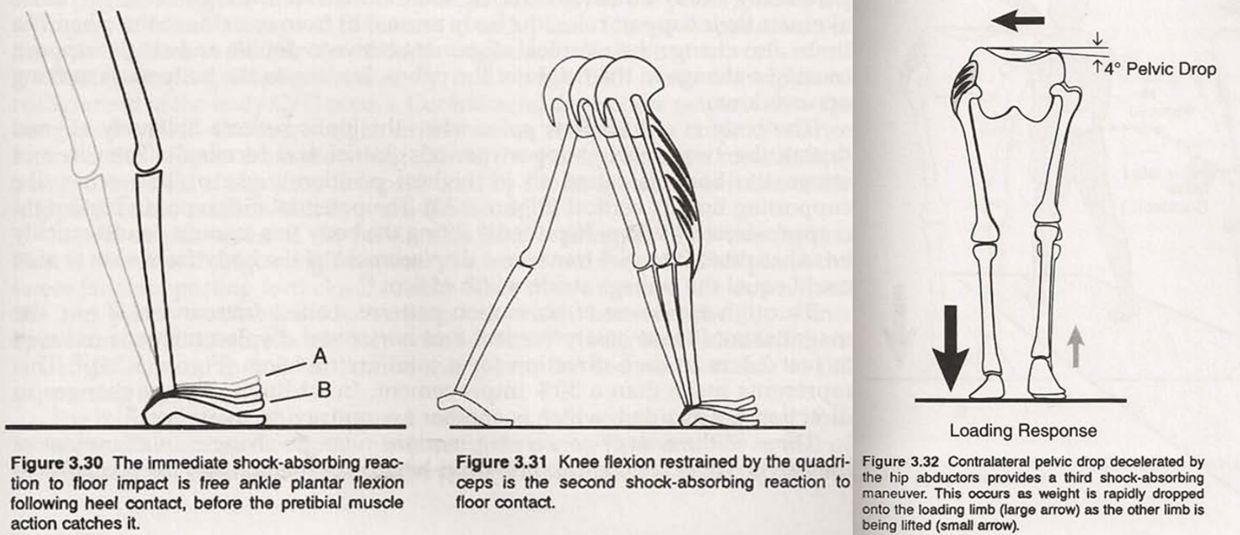
- 踝关节跖曲(initial contact开始),胫前肌肉的作用显著地抑制了运动,延迟了前足接触地板的时间到步态周期的8%而不是立即发生。
- 膝关节屈曲(initial contact开始) 股四头肌减缓膝关节屈曲速度的动作将部分负荷力转移到大腿肌肉群。因此,关节载荷的强度减小(对地板的冲击减小)。这反映在测力板上为没有初始的高冲击垂直载荷
- 载荷从一条腿到另一条腿后,pelvic drop 被支撑腿的外展肌抑制
Energy Conservation
- C/G alignment modulation and selective muscular control serve to reduce the intensity and duration of the muscular action involved.
- C/G Control
- Through a mixture of six motion patterns, called determinants of gait, the magnitude of these costly vertical and horizontal displacements is reduced to just 2.3cm in each direction for a total arc of 4.6cm (Figure 3.34). This represents more than a 50% improvement. In addition, abrupt changes in direction are avoided, which is another energy-saving maneuver.
- pelvis: contralateral drop, horizontal rotation and lateral displacement 由此产生的两髋之间的水平段通过增加地板接触点与躯干基部之间的距离,在功能上延长了四肢。骨盆旋转也使髋关节(以及支撑足)更靠近中线。这两种效果都减少了完成所需步长所需的肢体倾角。这种效果在终末站姿时最为明显,即双支撑相期间身体中心位置降低的幅度减小.
- limb:
- ankle control: (double support) terminal stance脚跟上升,通过抬高踝关节,相对延长后肢。脚后跟的initial contact同样增加了前肢的长度
- 脚踝和膝盖之间的交替运动(interchange between ankle and knee motion):
- Loading Response
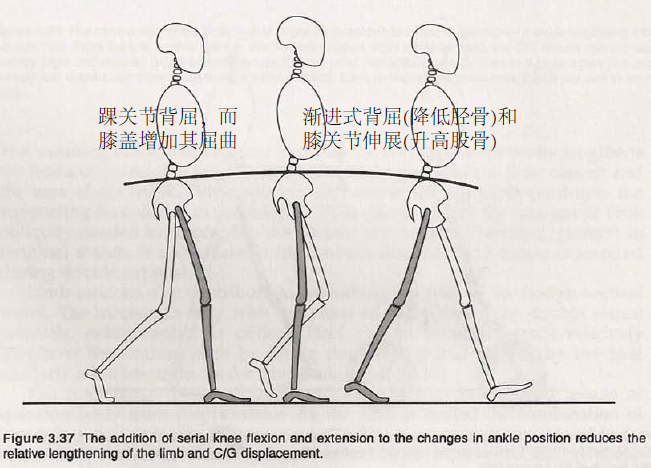
- foot flat之前 踝关节跖曲和膝关节的屈曲会降低身体抬高的速度
- foot flat之后 踝关节背屈,而膝盖增加其屈曲。
- Mid-Stance
- foot flat之后FA之前 踝关节背屈,而膝盖增加其屈曲。
- FA(feet adjacent之后) 渐进式背屈(降低胫骨)和膝关节伸展(升高股骨)
- Loading Response
- Selective Control
- The hip extensors contract only at the onset of limb loading. They then relax and allow momentum from the heel rocker and quadriceps action at the knee to extend the hip passively as the femur is advanced faster than the pelvis. 髋关节伸肌仅在肢体负荷开始时收缩。然后他们放松,让脚跟摇臂的动力和膝盖的股四头肌运动被动地伸展臀部,因为股骨比骨盆前进得快。
- At the knee, peak quadriceps aetion oecurs only during loading response and the onset of mid stance when the vector is behind the joint axis.As the vector moves forward of the knee axis, this muscle group relaxes, even though the knee has not reached full extension. Momentum completes the extensor motion. 在膝盖处,股四头肌运动的峰值只发生在Loading Response和Mid-Stance开始时,此时矢量在关节轴后面。当向量向前移动膝盖轴,这个肌肉群放松,即使膝盖没有达到完全伸展。动量完成伸肌运动。
- Ankle control is the only area that requires persistent muscle action from loading response to early pre-swing. Energy is conserved by minimizing the extent of cocontraction by antagonists. Modulating the intensity of plantar flexor muscle activity during the individual gait phases is a second means of reducing the energy cost. The intensity is low during mid stance when the limb is rolling forward over a stationary foot and then high in terminal stance when body weight must be supported on the forefoot (Figure 3.39c). 脚踝是唯一需要持续肌肉运动的区域,从loading response到early pre-swing。能量是通过使拮抗剂收缩的程度最小化来保存的。在每个步态阶段调节足底屈肌活动强度是降低能量消耗的第二种方法。当mid stance肢体在静止的脚上向前滚动时强度较低,而在必须在前脚上支撑身体重量的terminal stance时强度较高。
- Limb advancement in swing is a similar mixture of momentum, gravity and direct muscle control. The initiating action in pre-swing relies on residual force from the deactivated ankle plantar flexors combined with an unstable base of support. Hip flexion is a by-product of the adductor longus muscle action to restrain contralateral fall of the body. The resuIt is 35° of knee flexion gained without any direct muscle action. In initial swing the combination of hip flexion and tibial inertia provides 60° of knee flexion with minimal use of the knee muscles. In mid swing the knee is extended passively. Even the ankle dorsiflexor muscles often reiax for a brief time in late mid swing once the foot has passed the peak toe drag threat. Only in terminal swing is there vigorous activity of the hip extensors, knee extensors and ankle darsiflexors to prepare the limb quickly and assuredly for weight acceptance. 在摆动相中,下肢的前进是类似的动量、重力和直接肌肉控制的混合。pre-swing的初始动作依赖于踝关节跖曲肌的残余力,并结合不稳定的支撑面。髋关节屈曲是长内收肌抑制身体对侧跌倒的副产物。结果是在没有任何直接肌肉作用的情况下获得35°的膝关节屈曲。在最初的摆动中,髋关节屈曲和胫骨惯性的结合提供了60°的膝关节屈曲,膝关节肌肉的使用最少。在摇摆中,膝关节被动地伸展。一旦足部通过了脚趾阻力的峰值威胁,即使是踝关节背屈肌也会在mid swing后期短暂的放松。只有在terminal swing时,髋关节伸肌、膝关节伸肌和踝关节伸肌才会剧烈活动,使肢体快速、可靠地接受重量。
Normal Gait
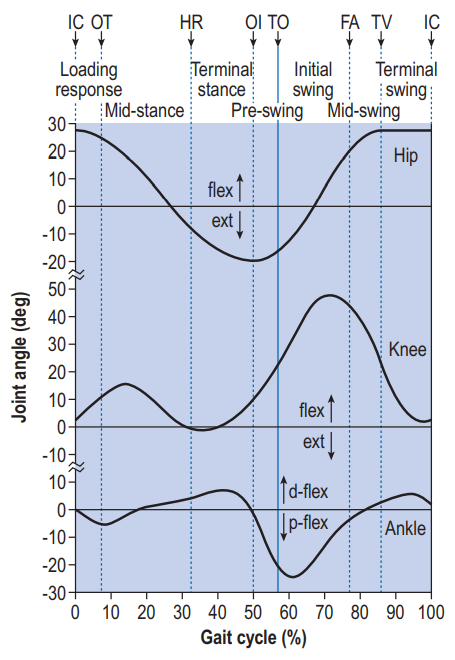
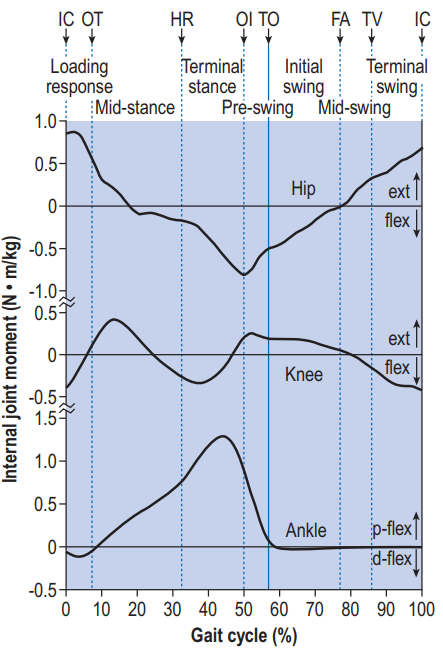
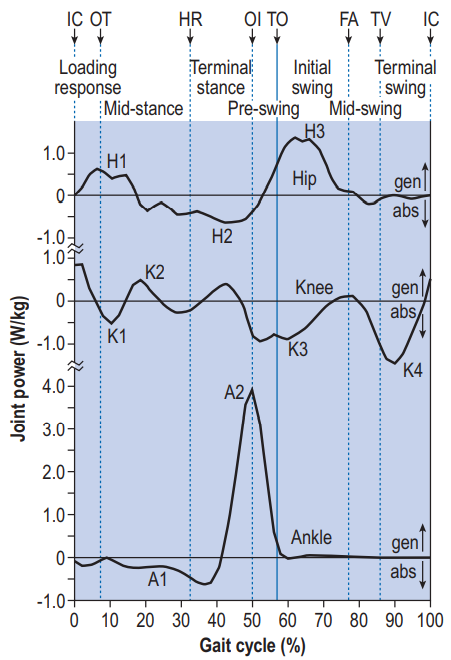
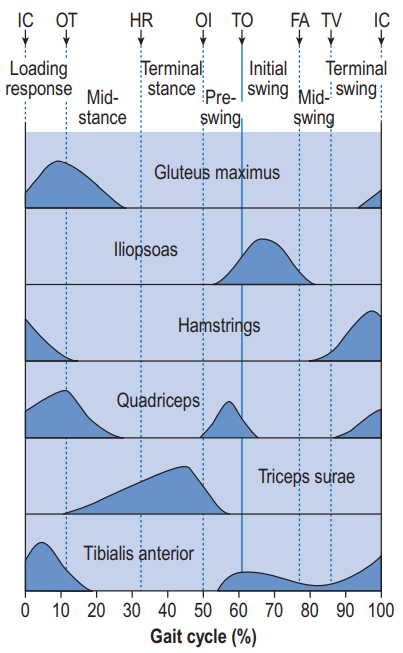
(A) Sagittal plane joint angles (degrees) (B) Sagittal plane internal joint moments (newton-meters per kilogram body mass) (C) Sagittal plane joint powers (watts per kilogram body mass) (D) Typical activity of major muscle groups during a single gait cycle of right hip (flexion positive), knee (flexion positive) and ankle (dorsiflexion positive).
IC = initial contact; OT = opposite toe off; HR = heel rise; OI = opposite initial contact; TO = toe off; FA = feet adjacent; TV = tibia vertical.
Perry的书中对每一个关节以及每一个步态相具体的motion以及力矩、肌肉控制都有很详细的阐述,有时间再看一下(TODO 同时确定检测肌肉&各个肌肉意义)
GRF与Phases
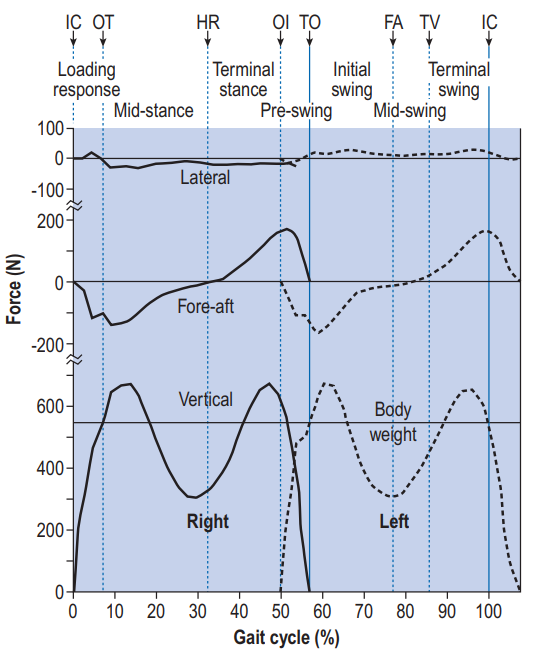
以及另一本书的说法4,但是我觉得没有下面这么理想化
根据实际数据看也不是这样的(实际数据LR在第一个峰值前已经完成,第一个峰值处应是FF foot flat(toe开始受力);
谷值是FA;第二个峰值过约3%是对侧的IC)

-
Rafael Caldas, Marion Mundt, Wolfgang Potthast, Fernando Buarque de Lima Neto, Bernd Markert,A systematic review of gait analysis methods based on inertial sensors and adaptive algorithms,Gait & Posture,Volume 57,,2017 ↩︎
-
J. Perry, J.M. Burnfield, Gait Analysis: Normal and Pathological Function(2nd ed.), SLACK Incorporated (2010) ↩︎
-
E. Ayyappa, Normal human locomotion, part 2: motion, ground-reaction force and muscle activity, J. Prosthet. Orthot. (1996), p.9 ↩︎