Motion control for a walking companion robot with a novel human–robot interface
Research question
A walking companion robot is presented for rehabilitation from dyskinesia of lower limbs and its motion control algorithms.
A new human– robot interface (HRI) adopts one-axis force sensor and potentiometer connector to detect the motion of the user with the common motions classified into two elemental motion states.
mathematical model-based control method and force control method $\Leftarrow$ distinction of motion states
Introduction
-
sensors
The design of human–robot interface involves two difficulties: the selected variables of body should fully reflect the motion state of the user and the sensors adopt to effectively measure the selected variables.
介绍了信息充分性和成本之间的trade-off
-
control
Admittance control algorithm and variant of admittance-based control algorithm are widely used in the walker robot. $ { }^{4,7,8,10,11,13} $ Fuzzy control is also widely used. $ ^{12,15,18,22} $Other control algorithms such as learning algorithm,$ ^{23} $ smooth control,$ { }^{24} $ and Bayesian Networks mode$ { }^{16} $ are also adopted to the walker robot.
The precise motion control highly depends on the design of HRI.
Methods
Recognition of elemental motion state
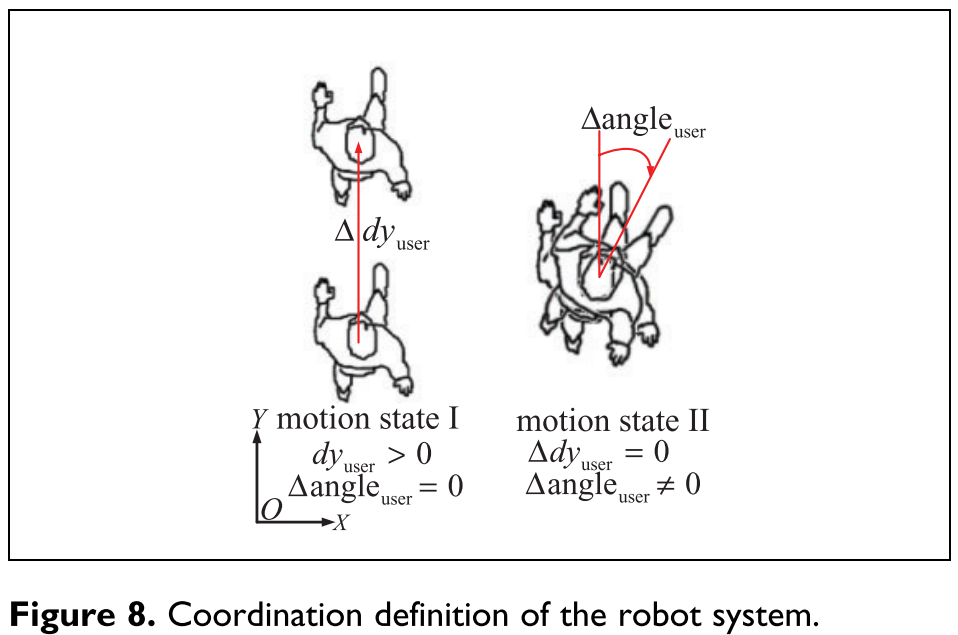
因为是辅助病人的,所以涉及的运动模式很有限,这篇文章只针对直行和转体两种。
A rule-based method with fuzzy threshold rules
Rule set (rule-based method) If $ \Delta F_{Y F}>0 $ and $ \Delta F_{Y F} \leq 0 $ and $ F_{Y B}>F_{Y F} $, then $ \Delta d y_{\text {user }}>0, \Delta angle _{\text {user }}=0 $
If $ \Delta F_{Y B}>0 $ and $ \Delta F_{Y F}>0 $ and $ F_{Y B} \approx F_{Y F} $ and $ P_{F}> P_{M_{F}} $ and $ P_{B}>P_{M_{B}} $, then $ \Delta d y_{\text {user }}>0, \Delta angle _{\text {user }}>0 $
If $ \Delta F_{Y B}>0 $ and $ \Delta F_{Y F}>0 $ and $ F_{Y B} \approx F_{Y F} $ and $ P_{F}<P_{M_{F}} $ and $ P_{B}<P_{M_{B}} $, then $ \Delta d y_{\text {user }}>0, \Delta angle _{\text {user }}<0 $
Mathematical model-based control method
Motion Ⅰ

Motion Ⅱ 类似
FC method

The force sensor data serve as the feedback of the control system rather than the input of control system.
The FC basic concept is: when the real-time force sensor data equals to the initial state force sensor data, it indicates that robot moves at the same pace or rotate at the same angle with user. The robot is seen as a stable system and the motion of user is seen as the disturbance, the initial output of the force sensor is seen as the reference input. The control objective is to make the real- time output of force sensors equal to the initial one-axis force sensor data by adjust the motion of robot.
Stability analysis
MMBC: close- loop transfer function; the characteristic equation of the system; roots of characteristic equation
FC: the open-loop transfer function; the characteristic polynomial; poles of the system
Thoughts/Comments
- TODO 项目相关:所以从这方面来看也能体现我这个工作的意义,选择显著相关的variable就可能降低对传感器的要求
- TODO 数据处理相关 the six- axis force/torque sensors or 3-D force sensors are required to remove noise (Kalman filters and G-h filters)